#事故#两起特斯拉事故最终报告:AEB系统没避免碰撞( 二 )
文章图片
▲2019年3月1日事故车辆
调查显示,特斯拉汽车正在US441高速公路由北向南行驶,卡车从特斯拉右前方路口驶出,希望向左转向驶向特斯拉的对向车道。
在撞击前12.3秒,这辆特斯拉Model 3正在以每小时69英里的速度处于巡航状态,并开启了交通感知控制系统。
在撞击前9.9秒,特斯拉启动了“自动辅助变道”,Autopilot L2级自动驾驶系统开启。在碰撞发生前的7.7秒时间内,特斯拉的前方碰撞预警系统没有发出警报,自动紧急制动没有激活。事后调查发现,车辆在碰撞前几秒也没有任何转向、制动操作。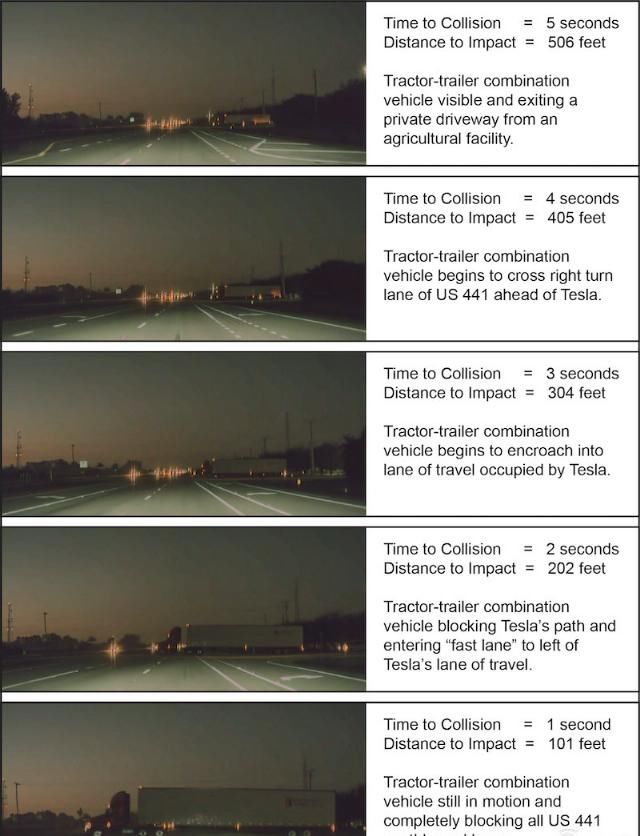
文章图片
▲事故发生前行车记录仪拍下的画面
而卡车驶出路口时,驾驶员注意到路口有停车标志,但仅仅适当减速,没有停车就直接驶入公路。当卡车行驶到特斯拉所在道路中央时,这辆特斯拉Model 3以每小时69英里的速度撞上卡车中部,特斯拉车顶被“削”掉。不过,这辆特斯拉还在继续向前滑行,最终在距离事故现场1680英尺的位置停下。
这起事故造成特斯拉驾驶员当场死亡,但卡车驾驶员并没有受伤。
NTSB认为,卡车驾驶员在路口没有停车,直接左转驶入高速公路,属于危险驾驶行为。特斯拉Model 3驾驶员过度依赖特斯拉L2级自动驾驶技术,导致注意力不集中。NTSB最终认定,事故原因是特斯拉Autopilot L2级自动驾驶系统在驾驶员脱手时没有及时提醒,与设计使用条件不一致,最终导致发生碰撞事故。
三、NTSB反思新车质检 应针对L2开发新检测方法
由于这两起事故都是特斯拉在使用Autopilot L2级自动驾驶系统时发生的,且事故发生前,车辆的前方碰撞预警系统没有发出警报,自动紧急制动没有激活。对此,特斯拉进行了回应。特斯拉表示,前方碰撞预警系统和自动紧急制动并不能完全避免高速撞车,“Autopilot自动辅助驾驶”功能也不能始终准确监测前方的危险情况。
不过,由于两起事故中驾驶员应该了解,L2级自动驾驶系统无法完全代替驾驶员操作,在驾驶过程中出现了走神的情况,因此事故主要责任都在于两位粗心大意的驾驶员,而不是特斯拉的软硬件设备。
NTSB调查两起事故后也作出反思,由于美国国家公路交通安全管理局尚未开发出L2级自动驾驶系统的安全保障措施的测试方法,因此在车辆出厂时,安全保障措施可能并不完善,最终导致碰撞事故。
NTSB主席Robert Sumwalt表示:“德拉海滩发生的事故中,驾驶员对自动驾驶系统过分依赖,但特斯拉自动驾驶并没有那么完善,最终导致悲剧性的后果。此外,在山景城的事故中,驾驶员除了过度依赖自动驾驶功能,还玩手机游戏分散注意力。这两起事故证明自动驾驶存在一定的安全隐患,我们还缺少强制性政策和更先进的技术。”
此前,NTSB也向美国国家公路交通安全管理局、职业安全与健康管理局、SAE International、苹果公司和其他手机制造商提出九项建议。
▲NTSB今年2月发布的调查报告
1、新车质检中增加前方碰撞预警系统测试
NTSB建议,在新车出厂前,如果车辆包含前方碰撞预警系统功能,应该接受前方碰撞预警系统测试。在实验室中模拟公路实际行驶状况,检测车辆的传感器是否能准确探测前方物体并采取安全措施。
2、评估特斯拉Autopilot自动辅助驾驶功能
针对特斯拉Autopilot自动辅助驾驶功能,要对其运行条件进行限制,防止驾驶员在设计使用条件之外出现误操作,防止出现不合理的使用逻辑。一旦发现问题,要及时通知特斯拉公司采取措施纠正错误。
3、制定驾驶员专注监测系统的标准
针对配备了L2级自动驾驶系统的车辆,美国国家公路交通安全管理局应与SAE International合作,共同制定驾驶员专注监测系统的标准,要在最大程度上让驾驶员专注于道路。
4、配备L2级自动驾驶的车辆要监测驾驶员专注度
推荐阅读
















- 浙江柯桥排查两起进口冷链食品风险相关人员核酸阴性
- 特斯拉|热评 | 加强OTA技术召回监管将有助于汽车产业健康发展
- 网通社|喜欢蔚来的越来越多了 连续四个月交付创新高 你是否愿意放弃特斯拉选择它?
- |警方提醒:冬季这样做极易引发交通事故!
- 特斯拉|把小鹏P7开上高速,它竟然自己跑起来了!
- 当心!这类事故1年近20万起!一个不小心,就是终身遗憾...
- 盖世汽车资讯|前十月全球电动车销量榜:特斯拉Model 3遭遇劲敌
- 特斯拉|五十步笑百步!特斯拉量产新电池,25万买的model3也将挨割
- 事故车|深夜识堂:二手车水深几许
- 特斯拉|新能源车销售火爆 北向资金增持产业链多家龙头