技术|优必选技术专家范文华深入讲解伺服驱动器在机器人上的研究与应用( 二 )
本体伺服驱动器 , 它是大力矩密度电机+低减速比齿轮箱 , 因为是低减速比 , 它的效率比较高 , 所以可以通过电机的电流大小间接推断出输出力矩的大小 。 一般应用在4足或小的双足机器人中 , 现在应用也逐渐成熟 。 它的特点是高频响应 , 而且抗冲击力比较强 , 因为它可以把冲击传递到电机端 , 而电机是柔性的 , 所以力矩反馈相对前面两种是比较精准的 , 但缺点是小减速比的减速箱能量输出密度的不足 , 所以在大型的双足机器人中不太适用 。
伺服驱动器的技术和特点
伺服驱动器的主要组成包括电机、控制板、减速器、位置传感器 。 但除了这几个 , 其实还有几个技术方向也不可缺少 , 它们在某些应用中也很重要 , 主要包括力矩感知和控制、电磁制动器(抱闸)、通信、软件算法和中空设计 , 下面分别介绍下 。
文章图片
– 力矩感知和控制
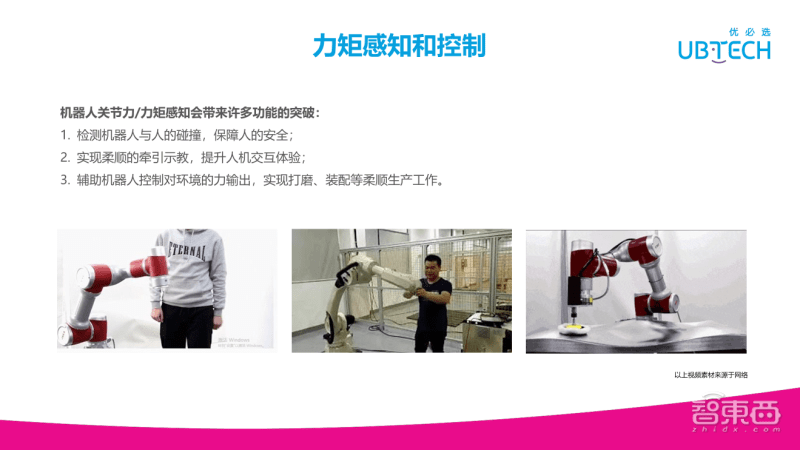
对于一个机器人来说 , 它的力矩感知和控制非常重要 , 因为机器人在运行时 , 要考虑到很多情况 , 比如考虑机器人和人的碰撞 , 需要保障人的安全 , 这时就需要知道机器人受到的外力或力矩是怎么样的 , 有检测功能就非常方便和精准 。 第二是实现柔顺牵引示教 , 提升人机交互体验 。 第三是在一些工业场所实现打磨 , 装配等柔顺的生产工作场景 , 也是需要力矩检测的 , 所以这种需求也逐渐成为一个必然的要求 。
力或者力矩的感知实现方式有很多种 , 最简单的一种类似电子皮肤 , 直接把一块电子皮肤贴到机器人的表面 , 目前电子皮肤的方式发展还不太成熟 , 没有实现大批量的量产 , 但在一些实验室已经开始应用 。 缺点是增加了布线和设计的难度 , 维护成本也较高 。 另一种方式像机械臂 , 可以在机械臂末端加入多维力的传感器来进行力的感知 , 这是现在应用比较多的方式 , 它方便集成 , 尤其在机器人的末端 , 目前已经成为标准的一个成品 , 采购和安装也比较方便 , 所以应用是比较多的 , 但成本也不低 。
在机器人或机械臂端 , 可以把力矩和力的感知做到伺服驱动器里 , 这样实现力控就更加方便 , 要达到这个目的有很多种实现方式 , 第一种可以基于关节电流的力距感知 , 类似于本体驱动器 , 只需测量电机的电流 , 就可以间接算出输出力矩的大小 , 但高减速比可能误差会大一些 。 第二种是SEA , SEA是串联弹性驱动器 , 它可以用弹性的形变和高精度的位置传感器来间接地测量力距的大小 。 再一种方式是力矩传感器 , 现在已经成为标准产品 , 可以直接安装在伺服驱动器的末端 。 再有就是应变片式 , 直接在输出轴上贴应变片 , 然后通过桥电路计算输出轴的形变量 , 进而估计力矩 。 对生产制造要求比较高 , 而且每个关节生产出来后都要单独标定 。
– 软件算法
下面介绍下软件算法 , 无论是伺服驱动器还是伺服电机 , 伺服算法基本上是基于电机的矢量控制来扩展进行的 , 还有一些其他的算法没有大批量的应用 。
我们做的伺服软件算法 , 功能比较齐全 , 包括高精度的位置传感器的处理、 PID参数的设定、各种保护机制、控制模式 , 比如位置、速度、电流、力矩 , 尤其是大型的伺服驱动器 , 这几种模式都是提供的 。 包括各个位置、速度、电流上下限的设定 , 断续控制和连续控制的模式的设定 , ID自由设定 , 通信的校验 , 在线升级等 。

文章图片
– 电磁制动器
目前 , 电磁制动器有两种设计方式 , 上图左边是转子和辐条连接在一起 , 当电磁阀断电时 , 在弹簧的作用下 , 金属棒插入辐条之间的缝隙中 , 阻挡电机转子旋转;当电磁阀通电时 , 在电磁力的作用下金属棒收起 ,辐条可以跟随转子旋转 。
第二种是右边的电磁抱闸 , 它是上下两个金属在电磁阀供电、断电时可以活动 , 中间加了一个石墨片 , 中间的石墨片和电机的转子卡在一起 , 当电磁抱闸通电吸合时 , 它对电机不制动 , 当断电时抱闸在弹簧的作用下抱住电机转子产生制动 。

文章图片
– 通信
目前通信方式应用最多的有:RS485 , CAN , EtherCAT等 , 它们各有优缺点 , 具体选用哪一种方式 , 要看伺服驱动器在机器人中的应用场景 。 先看下他们的特点:速率方面EtherCAT是最快的 , 可以达到100兆 , 所有通信方式都可以隔离 , 并且支持差分的方式 , 最远距离对于机器人已经足够;RS485可以支持全双工或半双工 , 最多支持32个从节点;CAN通信实时性非常强 , 节点有优先级 。 EtherCAT的速率高 , 而且延迟特别低 , 几个或几十个的从节点有小于100纳秒的延迟 , 它的数据刷新率非常的快 。 所以 , 如果要求不高 , 可以用RS485和CAN 。 如果整个系统控制命令的刷新率 , 要求在1k以上 , 可以选用EtherCAT 。
推荐阅读
















- 农业洞察|秋季大棚番茄何时打叶?番茄专家教你3招,番茄长势好、产量高
- 尖端技术|被2国垄断的尖端技术,中国已尽力打开敲门砖,而俄国仍一无所获
- 华为|任正非最新电邮:面对美国做好两件事!未来华为要逐步由专家来当家,不是谁官大谁拍板…
- 中国的核|中国承诺不首先使用核武,美媒提出三点质疑,专家:这思想很危险
- 病例|美国连续三天新增病例超5万例 专家警告流感季疫情或更严重
- 社会新鲜事|刘亦菲发自拍力破发腮变丑传言?结果被自己的直男自拍技术瞬间拆穿…
- 晓君侃史|四川老农上山挖笋,意外挖出2个“带血鸡蛋”,专家估价80万
- 盗刷|手机失窃后破解、盗刷仅需半小时?专家提醒设置SIM卡密码
- 技术升级|F5G+IPv6打破连接障碍,共同构建智能联接新世界
- 华为|任正非最新电邮!面对美国要做好这两件事,华为以后由专家当家