技术|优必选技术专家范文华深入讲解伺服驱动器在机器人上的研究与应用
_原题为 优必选技术专家范文华深入讲解伺服驱动器在机器人上的研究与应用 
文章图片
出品 | 智东西公开课
讲师 | 范文华 优必选技术专家
提醒 | 关注智东西公开课公众号 , 并回复关键词 优必选06 , 即可获取课件 。
导读:
8月24日 , 优必选技术专家范文华在智东西公开课进行了一场的直播讲解 , 主题为《伺服驱动器在机器人上的研究与应用》 , 这也是优必选专场第6讲 。
在本次讲解中 , 范文华老师围绕伺服驱动的研究现状、技术特点等方面 , 结合优必选在伺服驱动器产品上的研究、实际应用及未来研究方向展开深度讲解 。
同时和大家预告下 , 9月11日 , 第22届中国国际光电博览会同期 , 由智一科技旗下智能产业第一媒体智东西主办的移动机器人3D视觉论坛将在深圳国际会展中心举行 , 优必选科技副总裁、深圳研究院副院长庞建新博士将就《面向智能机器人的视觉感知与理解》这一主题带来分享 , 点击文末海报了解详情 。
本文为此次专场主讲环节的图文整理:
正文:
大家晚上好 , 我是优必选技术专家范文华 , 今天讲解的主题为《伺服驱动器在机器人上的研究与应用》 , 主要分为4个部分:
1、伺服驱动器的研究现状
2、伺服驱动器的技术与特点
3、优必选伺服驱动器的研究与应用
4、优必选伺服驱动器未来研究方向
伺服驱动器的研究现状
文章图片
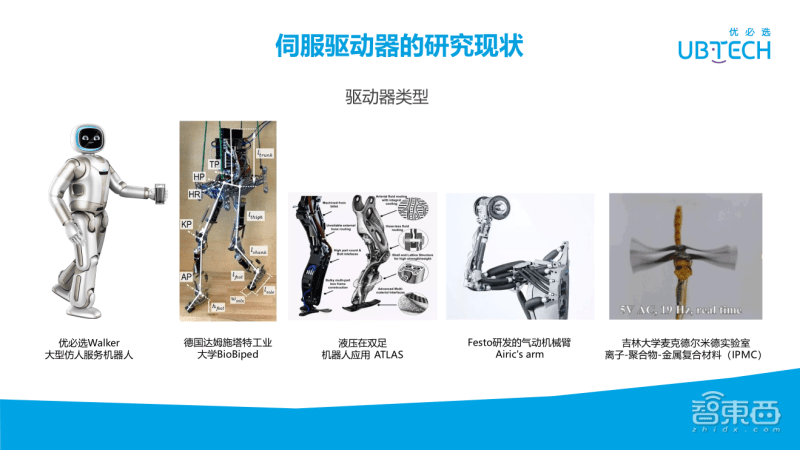
随着机器人的蓬勃发展 , 伺服驱动器的类型也越来越丰富 , 主要有有电驱、液压、线驱、气动及一些复合材料等形式 , 对于这么多的驱动形式 , 有些已经发展到产品阶段 , 但综合来看 , 电驱是目前发展最广泛 , 技术最成熟的方向 。 对于伺服驱动器 , 我将主要介绍电驱的伺服驱动器 , 也是上图最左边的Walker机器人所使用的 。
从开发上来看 , 伺服驱动器可分成小型伺服驱动器和大型伺服驱动器 , 怎样区分呢?主要看输出力矩 , 小型伺服驱动器的输出力矩范围为0.2Nm到6Nm之间 , 应用在教育、娱乐等桌面机器人上 。 大型伺服驱动器应用在大型服务机器人上 , 像Walker、Cruzr及一些机械臂等 。 同时市面上也有各种伺服驱动器 , 本次讲解的内容将主要涉及大型伺服驱动器 , 小型伺服驱动器也会讲解 , 可能涉及的内容不是太多 。
伺服驱动器的功能主要是实现机器人的精准运动 , 使得每一个关节能产生精确的输出位置和力矩 , 机器人的每个舵机在接收到位置指令后 , 可以实时响应命令 , 多个舵机协调运行 , 就可以产生犹如人类一般灵活的运动 。 小型伺服驱动器也叫舵机 , 所以讲解中可能有时叫舵机 , 有时叫伺服驱动器 , 实际上是同一个东西 。
从伺服驱动器的基本硬件构成来看 , 主要包括电机、控制板、减速器、位置传感器等部分 。 不论应用在哪种产品上面 , 或力矩大小 , 这四种基本的组成是不可缺少的 , 可能不同的伺服驱动器 , 它的电机类型、控制板的大小、功率和功能、减速器的类型(行星、谐波、RV)等不一样 , 但他们的基本构成不变 。
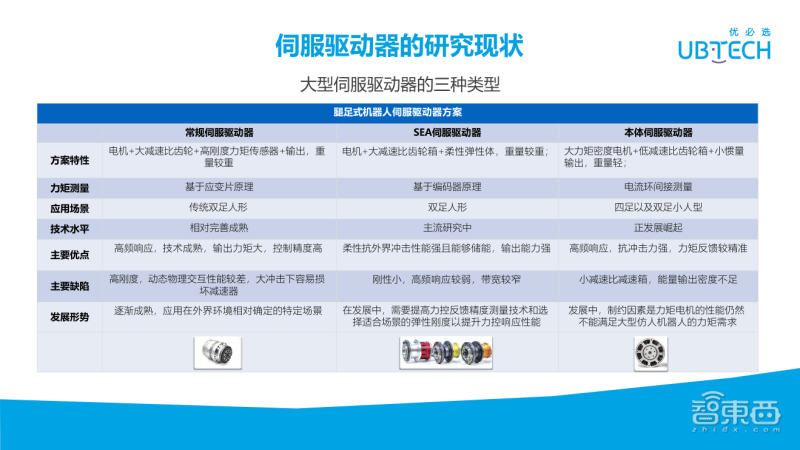
任赜宇从应用和设计的方式上把大型伺服驱动器分为常规方案、SEA、本体驱动器三个类型 , 我也比较同意这种分类方式 。 常规方案是用常规的电机+高减速比的减速箱 , 输出端也是高刚度的力矩检测;SEA是常规电机与高减速比 , 但与常规方案不同之处在输出端 , 多了一个弹性体 , 弹性体是弹性的形变角度 , 与输出的力矩成正比 , 用位置传感器检测弹性体的形变 , 从而推断出力距的大小 , 这是目前研究比较多的设计方式;本体驱动器 , 高输出力矩密度电机+低减速比减速箱 , 它的特点是小惯量输出、响应速度比较快 , 一般应用在4足机器人中 。
文章图片
上图(引用知乎@任赜宇)主要从方案的特性 , 力矩测量、应用场景、技术水平和优缺点简单对比了这三种方案 。 常规伺服驱动器是机器人中应用比较多的设计方式 , 电机+大减速比齿轮+高刚度力矩传感器 , 它的力矩测量是基于应变片原理 , 形变比较小 , 应用场景是传统的双足人形机器人 , 主要优点是高频响应较好 , 技术比较成熟 , 输出力矩大 , 控制精度高 , 但同时因为高刚度 , 造成了动态物理交互性能较差 , 在大冲击的情况下容易损坏减速器 。 目前 , 在外界环境相对稳定的场景中应用比较合适 。
常规方案的高刚度在SEA当中被弥补 , SEA是在常规方案的基础上 , 在输出端加入柔性弹性体 , 所以SEA是基于位置编码器的原理来测量力矩大小 , 也应用在双足人形机器人中 。 现在很多科研院所都在研究SEA , 因为它有很多优点 , 比如因为是柔性 , 所以抗外界冲击的能力比较强 , 而且还能达到一定储能的效果 。 但是因为柔性 , 所以刚性小 , 高频响应较弱 , 带宽比较窄 , 所以影响它的反应能力 。 在一些特定的应用场景中 , 要考虑它的力矩反馈的精度和因为弹性所产生的力控响应性能的折中选择 。
推荐阅读













- 农业洞察|秋季大棚番茄何时打叶?番茄专家教你3招,番茄长势好、产量高
- 尖端技术|被2国垄断的尖端技术,中国已尽力打开敲门砖,而俄国仍一无所获
- 华为|任正非最新电邮:面对美国做好两件事!未来华为要逐步由专家来当家,不是谁官大谁拍板…
- 中国的核|中国承诺不首先使用核武,美媒提出三点质疑,专家:这思想很危险
- 病例|美国连续三天新增病例超5万例 专家警告流感季疫情或更严重
- 社会新鲜事|刘亦菲发自拍力破发腮变丑传言?结果被自己的直男自拍技术瞬间拆穿…
- 晓君侃史|四川老农上山挖笋,意外挖出2个“带血鸡蛋”,专家估价80万
- 盗刷|手机失窃后破解、盗刷仅需半小时?专家提醒设置SIM卡密码
- 技术升级|F5G+IPv6打破连接障碍,共同构建智能联接新世界
- 华为|任正非最新电邮!面对美国要做好这两件事,华为以后由专家当家