技术|优必选技术专家范文华深入讲解伺服驱动器在机器人上的研究与应用( 三 )
– 中空设计
关于中空设计 , 在一些机械臂的应用中需要走线 , 因为机械臂可能要串4~7个伺服驱动器 , 尤其是家庭应用或服务机器人 , 不可能在外部走线 , 线就要想办法从中间穿过去 , 伺服驱动器做成中空是最方便的 。 如果是中空再加上滑环结构 , 就可以实现伺服驱动器的多圈输出 , 功能也可以扩展 。
伺服驱动器的研究和应用

文章图片
优必选自2012年公司成立就开始做机器人的研发 , 但伺服驱动器的研发更早 。 2008年就成立团队开始伺服驱动器的研究 。 因为刚做机器人时 , 发现伺服驱动器是机器人的一个很重要的模块 , 如果买现成的价格比较高 , 所以就下定决心把这个技术进行突破 。 从那时开始一直到现在 , 经过长期的技术积累 , 开发了各种各样应用于不同机器人的伺服驱动器 。 到目前为止 , 所有的款型加起来可能有40多款 , 上图是一些典型的伺服驱动器 。

文章图片
上图是小型伺服驱动器 , 最小是2kg.cm , 也就是0.2Nm , 从0.2 Nm到6 Nm的范围 , 电压覆盖了有7.4V、11.1V、还有24V , 小型伺服驱动器用的都是有刷电机 , 所以这些伺服驱动器是大批量量产的 。 它的特点包括单线串行 , 尺寸比较小、噪音低、安装灵活方便 , 锁位精度高 , 1M的高速通信 , 响应比较及时 , 支持输出离合保护 , 宽电压、兼容性比较好 , 支持过欠压、过流、过温等故障检测 , 使用寿命长 , 还支持固件的升级 。 尤其在高性价比、高寿命设计上 , 我们实现了很多创新设计 。

文章图片
上图是12kg.cm伺服驱动机的应用案例 。 12公斤的伺服驱动器是我们公司销量最大的伺服驱动器之一 , 它应用在Alpha 1、Alpha 1 Pro、教育类机器人Yanshee等几款机器人上 。

文章图片
上图是大型伺服驱动器 , 左上角这款是扭矩最大的一款 , 为120Nm , 最小的是右下角15Nm 。 电压基本上都是48V , 设计方式基本上以谐波减速电机、高精度位置传感器为主 。
大型伺服驱动器的特点包括:高集成度、高性价比、高同步性 。 高集成度怎么理解呢?就是一体化设计 , 各种仿真 , 优化设计 , 达到体积重量的最小化 , 包括控制板内嵌到伺服驱动器里 。 第二是高性价比 , 怎么实现高性价比呢?一方面找国内的一些核心零部件实现成本的最优化 , 之后采用严格的生产工艺 , 加上完备的测试流程来保证高性价比 。 第三个是高同步性 , 采用EtherCAT通信 , 多从站通信延迟小于100ns 。 下图是大型伺服驱动器的应用场景 。

文章图片
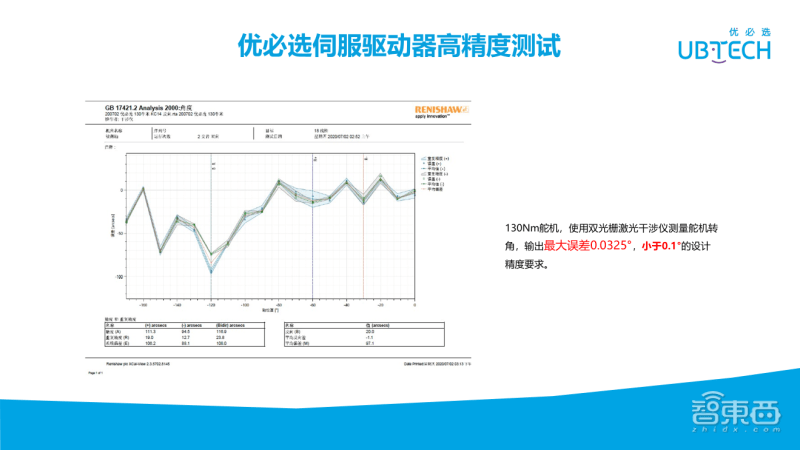
下面简单介绍下伺服驱动器的测试 。 首先是120Nm伺服驱动器最大输出力矩测试 , 最大输出力矩毫无压力 。 接着是伺服驱动器高精度测试 , 如下图所示 , 这是130Nm的舵机 , 使用双光栅激光干涉仪测量舵机转角 , 输出最大误差0.0325° , 小于0.1°的设计精度要求 。
文章图片
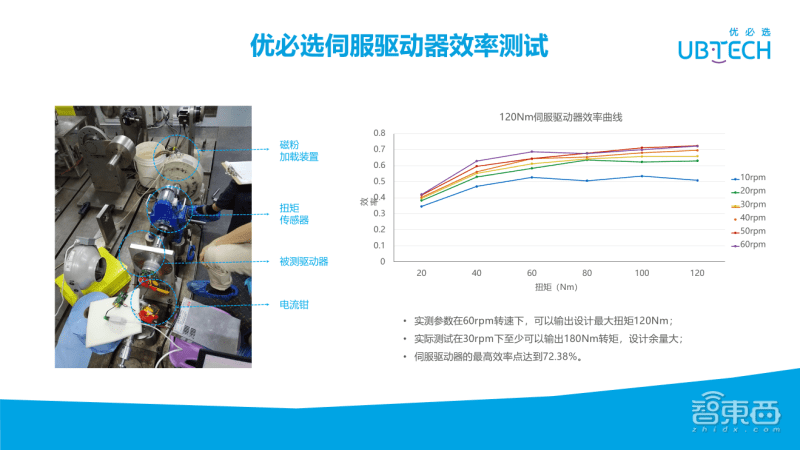
下图是120Nm伺服驱动器的效率曲线 , 实测参数在60rpm转速下 , 可以输出设计最大扭矩120Nm;实际测试在30rpm下 , 至少可以输出180Nm转矩 , 设计余量大;通过测试 , 可以看到伺服驱动器的最高效率点达到72.38% 。
文章图片
伺服驱动器的性能指标也比较多 , 那在做机器人时 , 伺服驱动器怎么选择?选择哪种类型的伺服驱动器?从价格、抗冲击性、通信、噪声控制精度、响应速度、功率密度等这几个方面列了下他们的优先级 。 应用场景分为桌面小型双足机器人、四足机器人、大型双足机器人三个 。
对于桌面型的小型双足机器人 , 因为要大批量的量产 , 它的价格非常敏感 , 所以在选择伺服驱动器时 , 它的性价比、抗冲击性、通讯、实时性和噪声是比较关心的几个参数 。 同时对于功率密度、响应速度等要求不是太高 。
对于四足机器人 , 它的响应速度、抗冲击力和价格是需要优先考虑的因素 , 尤其是价格 。 最近 , 伺服驱动器在四足上 , 价格还一直在下降 , 所以对这几个参数的指标要求是比较优先的 , 同时对于控制精度和噪声的要求相应较低 。
对于大型的双足机器人 , 他的要求比较高 , 对控制精度、响应速度 , 通信的实时性、功率密度等要求都比较高 。 目前价格还是比较高的 , 所以价格、抗冲击力、噪声相对要求不是很高 。 但是从长期来看 , 降低价格、减小冲击力、降低噪音 , 也是未来伺服驱动器发展的目标之一 。
推荐阅读












- 农业洞察|秋季大棚番茄何时打叶?番茄专家教你3招,番茄长势好、产量高
- 尖端技术|被2国垄断的尖端技术,中国已尽力打开敲门砖,而俄国仍一无所获
- 华为|任正非最新电邮:面对美国做好两件事!未来华为要逐步由专家来当家,不是谁官大谁拍板…
- 中国的核|中国承诺不首先使用核武,美媒提出三点质疑,专家:这思想很危险
- 病例|美国连续三天新增病例超5万例 专家警告流感季疫情或更严重
- 社会新鲜事|刘亦菲发自拍力破发腮变丑传言?结果被自己的直男自拍技术瞬间拆穿…
- 晓君侃史|四川老农上山挖笋,意外挖出2个“带血鸡蛋”,专家估价80万
- 盗刷|手机失窃后破解、盗刷仅需半小时?专家提醒设置SIM卡密码
- 技术升级|F5G+IPv6打破连接障碍,共同构建智能联接新世界
- 华为|任正非最新电邮!面对美国要做好这两件事,华为以后由专家当家