зҷҫеәҰиғҢеҸӣжҝҖе…үйӣ·иҫҫи·ҜзәҝдәҶеҗ—пјҹ( е…« )
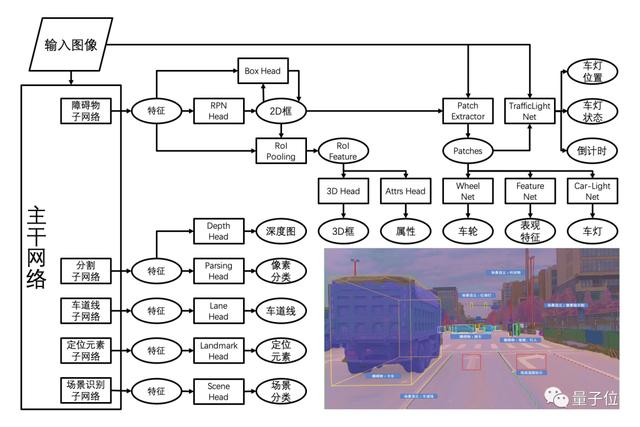
дёәдәҶеңЁиҪҰиҪҪи®Ўз®—еҚ•е…ғзҡ„жңүйҷҗз®—еҠӣдёҠе®ҢжҲҗеҰӮжӯӨеәһеӨ§зҡ„и§Ҷи§үдҝЎжҒҜеӨ„зҗҶд»»еҠЎ пјҢ Apollo Liteе……еҲҶеҸ‘жҺҳеӯҗд»»еҠЎд№Ӣй—ҙзҡ„зӣёе…іжҖ§ пјҢ и®ҫи®ЎеҮәеұӮж¬ЎеҢ–зҡ„зү№еҫҒе…ұдә«з»“жһ„ пјҢ йҮҮз”Ёе…ұдә«еӯҗзҪ‘з»ңзҡ„ж–№ејҸжқҘйҷҚдҪҺи®Ўз®—йҮҸ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
в–іApollo Liteи§Ҷи§үзҘһз»ҸзҪ‘з»ңзі»з»ҹе…ұдә«зү№еҫҒзҪ‘з»ңеңЁжҸҗеҚҮжҺЁзҗҶж•ҲзҺҮзҡ„еҗҢж—¶ пјҢ д№ҹеўһеҠ дәҶж„ҹзҹҘд»»еҠЎд№Ӣй—ҙзҡ„иҖҰеҗҲеәҰ гҖӮ иҖҢдёҚеҗҢж„ҹзҹҘд»»еҠЎеңЁж•°жҚ®и§„жЁЎгҖҒиҫ“е…Ҙиҫ“еҮәеҪўејҸгҖҒдјҳеҢ–зӣ®ж Үзӯүж–№йқўйғҪеӯҳеңЁдёҚеҗҢзЁӢеәҰзҡ„е·®ејӮ пјҢ иҝҷз»ҷзҰ»зәҝи®ӯз»ғеёҰжқҘдәҶе·ЁеӨ§жҢ‘жҲҳ гҖӮ
дёәи§ЈеҶіејӮжһ„ж•°жҚ®зҡ„и®ӯз»ғй—®йўҳ пјҢ Apollo Liteжҗӯе»әдәҶдёҖеҘ—еҲҶеёғејҸеӨҡд»»еҠЎжЁЎеһӢи®ӯз»ғжЎҶжһ¶ пјҢ иҮӘйҖӮеә”йҮҮж ·дёҚеҗҢд»»еҠЎзҡ„ж•°жҚ®йҖҒе…Ҙи®ӯз»ғ пјҢ жҝҖжҙ»е…¶еҜ№еә”зҡ„зҪ‘з»ңеӯҗйӣҶ并计算жҚҹеӨұ пјҢ 然еҗҺз»ҹдёҖжӣҙж–°е…ұдә«зҡ„зҪ‘з»ңеҸӮж•° гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
в–іApollo LiteеӨҡд»»еҠЎи®ӯз»ғжЎҶжһ¶дҫқжүҳејәеӨ§зҡ„жңәеҷЁеӯҰд№ еҹәзЎҖи®ҫж–Ҫд»ҘеҸҠжҢҒз»ӯгҖҒзІҫеҮҶзҡ„ж•°жҚ® пјҢ Apollo Liteе…ій”®жЁЎеһӢиҝӯд»Јж•ҲзҺҮзӣёжҜ”19е№ҙеҲқжҸҗеҚҮдәҶиҝ‘4еҖҚ пјҢ еҚғдёҮйҮҸзә§и®ӯз»ғж•°жҚ®дёҠзҡ„еӨҡд»»еҠЎжЁЎеһӢеҗҢжӯҘжӣҙж–°иғҪеӨҹеңЁ1е‘Ёд№ӢеҶ…е®ҢжҲҗ гҖӮ
еӣһеҲ°жң¬иҠӮејҖзҜҮзҡ„й—®йўҳ вҖ“ жҳҜеҗҰжӢҘжңүдәҶжө·йҮҸж•°жҚ®е°ұзӯүеҗҢдәҺиҮӘеҠЁиҝҲиҝӣе®Ңе…Ёж— дәәй©ҫ驶пјҹ
жҲ‘们并дёҚжғіжҖҘдәҺдёӢз»“и®ә пјҢ жҜ•з«ҹж•°жҚ®зҡ„жғіиұЎз©әй—ҙе·ЁеӨ§жңүеҫ…ж·ұе…ҘжҢ–жҺҳ пјҢ дҪҶеҸҜд»ҘиӮҜе®ҡ并е’ҢиҜ»иҖ…еҲҶдә«зҡ„жҳҜе®һи·өжұӮзңҹзҡ„йҒ“и·Ҝ并йқһдёҖдәӣжҠҖжңҜж–ҮжЎҲжҸҸеҶҷзҡ„йӮЈж ·дёҖи№ҙиҖҢе°ұ гҖӮ
ж•°жҚ®й—ӯзҺҜеҜ№дёҡеҠЎдә§з”ҹзҡ„д»·еҖјжҳҜжҠҖжңҜжҢҒз»ӯи·ҹиёӘзҡ„жҢҮж Ү гҖӮ д»Ҙж•°жҚ®жҢ–жҺҳзҺҜиҠӮдёәдҫӢ пјҢ йҷӨе…іжіЁж–°жЁЎеһӢеңЁжӯӨеүҚжҢ–жҺҳз§ҜзҙҜзҡ„bad caseдёҠзҡ„зҙҜи®Ўдҝ®еӨҚзҺҮеӨ– пјҢ жөӢиҜ•иҪҰиҫҶеңЁжҢ–жҺҳ规еҲҷеӣәе®ҡеүҚжҸҗдёӢзҡ„жҢ–жҺҳйҮҸд№ҹжҳҜиҖғж ёй—ӯзҺҜж•Ҳжһңзҡ„йҮҚиҰҒеҸӮиҖғ гҖӮ жҲ‘们еёҢжңӣзңӢеҲ°жЁЎеһӢиҝӯд»ЈеёҰеҠЁдҝ®еӨҚзҺҮж”ҖеҚҮ пјҢ еҗҢ时规模еҢ–и·ҜжөӢйҳ¶ж®өеҗҢзұ»й—®йўҳзҡ„еӨҚзҺ°зҺҮжҢҒз»ӯиө°дҪҺ гҖӮ
йҖҡиҝҮжҢҮж Үи·ҹиёӘеҲҶжһҗ пјҢ иғҪеӨҹзңӢеҲ°ж•°жҚ®й—ӯзҺҜд»·еҖјеңЁдёҖйғЁеҲҶж„ҹзҹҘд»»еҠЎдёҠе‘ҲзҺ°дәҶжҳҺжҳҫзҡ„еўһй•ҝи¶ӢеҠҝ гҖӮ дҪҶд№ҹеӯҳеңЁдёҖйғЁеҲҶд»»еҠЎиҝӣе…ҘдәҶдҫқйқ еҚ•зәҜзҒҢе…Ҙж•°жҚ®е·Іж— жі•з»ҙжҢҒ收зӣҠеўһй•ҝзҡ„йҳ¶ж®ө пјҢ жӯӨж—¶з ”еҸ‘дәәе‘ҳйңҖйҮҚж–°е®Ўи§Ҷж•°жҚ®й“ҫжқЎдёҠзҡ„зҺҜиҠӮ пјҢ д»Һйҳ¶ж®өв…ўйҖҖеӣһеҲ°йҳ¶ж®өв…Ў пјҢ еӣһеҪ’еҲ°еҜ№ж Ү注规еҲҷзҡ„з ”з©¶жҲ–ж–°зҡ„зҪ‘з»ңз»“жһ„и®ҫи®ЎиҝҷдәӣеҒҸеҹәзЎҖзҡ„е·ҘдҪңдёӯ гҖӮ
зӣёдҝЎеҰӮдҪ•жңүж•ҲиҺ·еҸ–ж•°жҚ®е№¶е°Ҷд№ӢиҪ¬еҢ–жҲҗеҸҜиў«ж„ҹзҹҘзҡ„й©ҫ驶иғҪеҠӣдјҡжҳҜдјҙйҡҸApollo LiteжҲҗй•ҝзҡ„й•ҝжңҹжҠҖжңҜй—®йўҳ пјҢ йңҖиҰҒжҠҖжңҜеӣўйҳҹжІүдёӢеҝғжқҘйҖҡиҝҮе®һи·өйҖҗжӯҘжү“йҖҡиҝҷжқЎж•°жҚ®йҖҡи·Ҝ гҖӮ
04 з»“е°ҫдёҺеұ•жңӣеҶҚе…Ҳиҝӣзҡ„жҠҖжңҜй•ҝж—¶й—ҙи„ұзҰ»дә§е“Ғе’Ңз”ЁжҲ·д№ҹжҳҜеӯӨз«Ӣзҡ„ пјҢ еңЁйўҶиҲӘиҫ…еҠ©й©ҫ驶дә§е“Ғз«һдәүзҷҪзғӯеҢ–зҡ„д»ҠеӨ© пјҢ зҷҫеәҰе°ҶApollo Liteи§Ҷи§үж„ҹзҹҘжҠҖжңҜд»ҺL4еә”з”ЁйҷҚз»ҙиҮіL2+зә§йўҶиҲӘиҫ…еҠ©й©ҫ驶 пјҢ жү“йҖ иҰҶзӣ–вҖңжіҠиҪҰеҹҹ+иЎҢиҪҰеҹҹвҖқзҡ„еҹҺеёӮе…ЁеңәжҷҜжҷәиғҪй©ҫ驶дёҖдҪ“еҢ–и§ЈеҶіж–№жЎҲ - Apolloжҷәй©ҫдә§е“ҒANPпјҲApollo Navigation Pilotпјү гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
Apollo LiteдёӨиҪ»дёҖејәзҡ„жҠҖжңҜзү№зӮ№еҸҜд»ҘжһҒеҘҪзҡ„иһҚе…Ҙдә§е“Ғ пјҢ гҖҢиҪ»дј ж„ҹеҷЁгҖҒиҪ»з®—еҠӣгҖҚйқўеҜ№и§„жЁЎйҮҸдә§ж— жғ§жҲҗжң¬еҺӢеҠӣ пјҢ еҗҢж—¶гҖҢејәж„ҹзҹҘиғҪеҠӣгҖҚиғҪеӨҹеҠ©еҠӣANPеә”еҜ№еҹҺеёӮйҒ“и·Ҝй©ҫ驶дёӯзҡ„еҗ„зұ»еӨҚжқӮеңәжҷҜ гҖӮ
иҮӘеҠЁй©ҫ驶жҳҜе…¬и®Өзҡ„жҷәиғҪжұҪиҪҰеҶіиғңзӮ№ пјҢ жӯЈеј•йўҶж–°дёҖиҪ®дҪ“йӘҢеҚҮзә§ гҖӮ
еңЁANPе№ҝе·һеҸ‘еёғд№ӢеҗҺ пјҢ еӣҪеҶ…д№ҹжңүеӘ’дҪ“иҜ„д»·иҜҙ пјҢ зҷҫеәҰApolloзҡ„зәҜи§Ҷи§үиҮӘеҠЁй©ҫ驶дә§е“ҒеҸ‘еёғ пјҢ еҜ№зү№ж–ҜжӢүжҳҜдёҖж¬ЎвҖңеҘҮиўӯвҖқ пјҢ еӣ дёәApolloз”ҹжҖҒејҖж”ҫзҡ„зү№жҖ§ пјҢ еҸҜд»Ҙжӣҙеҝ«е®һзҺ°зү№ж–ҜжӢүдёҖж ·зҡ„жҷәиғҪй©ҫ驶иғҪеҠӣ пјҢ зұ»дјјдәҺApollo+иҪҰеҺӮзҡ„е®үеҚ“з”ҹжҖҒ пјҢ дјҡи·ҹзү№ж–ҜжӢүFSDе°Ғй—ӯзҡ„iOSз”ҹжҖҒеҪўжҲҗжҠ—иЎЎ гҖӮ
иҷҪ然иҝҷж ·зҡ„зұ»жҜ”еҸҜд»Ҙи®©жӣҙеӨҡдәәеҪўиұЎзҡ„зңӢеҲ°дёҡжҖҒ пјҢ дҪҶеқҰзҺҮзҡ„иҜҙ пјҢ Apollo Liteжӣҙдё»иҰҒзҡ„жҳҜжҸҗдҫӣдәҶзү№ж–ҜжӢүFSDе’ҢMobileyeд№ӢеӨ–зҡ„еӣҪдә§йҖүжӢ© пјҢ жҲ–и®ёвҖңдёүи¶ійјҺз«ӢвҖқжӣҙеҗҲйҖӮ гҖӮ
иҷҪ然д»ҠеӨ©зҡ„Apollo LiteеҸӘжңүдёӨеІҒ пјҢ дҪҶе®ғж— з–‘е·Із»Ҹз«ҷеңЁдәҶжҪ®еӨҙжөӘе°– гҖӮ
вҖ” е®Ң вҖ”
йҮҸеӯҗдҪҚ QbitAI В· еӨҙжқЎеҸ·зӯҫзәҰ
гҖҗзҷҫеәҰиғҢеҸӣжҝҖе…үйӣ·иҫҫи·ҜзәҝдәҶеҗ—пјҹгҖ‘
жҺЁиҚҗйҳ…иҜ»














- 马ж–Ҝе…ӢеҲҡжҲҗе…ЁзҗғйҰ–еҜҢпјҢиЎҢдёҡеҸҲзҲҶйҮҚзЈ…ж–°й—»пјҒзҷҫеәҰиҰҒйҖ жұҪиҪҰдәҶпјҢеҗҲдҪңж–№жҳҜе®ғпјҒдј дёҺиӢ№жһңеҗҲдҪңйҖ иҪҰпјҢйҹ©еӣҪжұҪиҪҰе·ЁеӨҙиӮЎд»·жҡҙж¶Ё
- дј й—»еқҗе®һпјҡжқҺд№ҰзҰҸжқҺеҪҰе®ҸиҒ”жүӢпјҒеҗүеҲ©зҷҫеәҰе®ҳе®ЈйҖ иҪҰ
- е°Ҹзұіжңүе“Ғдј—зӯ№жҝҖе…үйј»зӮҺжІ»з–—д»ӘпјҡдёҚеҗғиҚҜ дёҚејҖеҲҖ
- з”ЁжҲ·|2020дә’иҒ”зҪ‘гҖҢе№ҙз»ҲзӣҳзӮ№гҖҚд№ӢзӣҳзӮ№пјҡзҷҫеәҰжңҖжіӘзӣ®пјҢи¶ЈеӨҙжқЎжҺҘең°ж°”
- 2021е№ҙдә’иҒ”зҪ‘е·ЁеӨҙ第дёҖд»—пјҒйЈһд№ҰејҖж’•еҫ®дҝЎпјҢйҳҝйҮҢеҚҺдёәзҷҫеәҰе…ЁйғҪе…ҘеұҖ
- 2020зҷҫеәҰең°еӣҫз”ҹжҖҒеӨ§дјҡпјҡејҖж”ҫе№іеҸ°еҚҒе‘Ёе№ҙ дёәиЎҢдёҡйҖҒеҮәеӨҡдёӘи§ЈеҶіж–№жЎҲвҖңеӨ§зӨјеҢ…вҖқ
- дёҖдёӘдәәе®ҢжҲҗAIејҖеҸ‘е’ҢйғЁзҪІ зҷҫеәҰйЈһжЎЁе®һзҺ°й“Ғи·Ҝиҙ§иҪҰиҪҰеҸ·зІҫеҮҶжЈҖжөӢ
- жӣқiPhone 13е…Ёзі»ж Үй…ҚжҝҖе…үйӣ·иҫҫжү«жҸҸд»Ә зңҹе°ұеҚҒдёүйҰҷпјҹ
- зҷҫеәҰзҪ‘зӣҳдё»дҪ“е…¬еҸёеҸ‘з”ҹеҸҳжӣҙпјҢеёӮеҖјзҝ»еҖҚжӯЈеҖјжӢҶеҲҶдёҠеёӮеҘҪж—¶жңәпјҹ
- д»Һе·ҘзЁӢеёҲеҲ°вҖңж°ҙжһңзҢҺдәәвҖқд»–еңЁзҷҫеәҰеҒҡ科жҷ®