жҷәиғҪиҪҰз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі•з ”з©¶
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
в–І жқҺдҪіжҳҠ зҺӢи°ўжҸҙ еҗҙж¶ӣ
еңЁз ”究еҹәдәҺз”өж„ҹзҡ„жҷәиғҪиҪҰж–№еҗ‘жҺ§еҲ¶ж—¶еҸ‘зҺ°дәҶејҜйҒ“жӢҹеҗҲеәҰй«ҳзҡ„е·®жҜ”е’Ңе·®еҠ жқғз®—жі• гҖӮ жң¬ж–Үд»Һз®—жі•зҡ„еҸ‘зҺ°гҖҒз®—жі•еҺҹзҗҶеҮәеҸ‘еҜ№е·®жҜ”е’Ңе·®з®—жі•иҝӣиЎҢжҸҸиҝ° пјҢ 并дҪҝз”ЁMATLABгҖҒPythonе»әжЁЎеҜ№е…¶ејҜйҒ“жӢҹеҗҲеәҰй«ҳзҡ„зү№зӮ№дёҺе…¶д»–дјҳеҠҝиҝӣиЎҢиҜҒжҳҺ гҖӮ
е…ій”®иҜҚпјҡжҷәиғҪиҪҰпјӣз”өж„ҹпјӣMATLABпјӣ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
еңЁз ”究еҹәдәҺз”өж„ҹзҡ„жҷәиғҪиҪҰж–№еҗ‘жҺ§еҲ¶ж—¶ пјҢ йҰ–е…ҲдҪҝз”ЁдәҶиҫғдёәжҷ®йҒҚзҡ„з”өж„ҹе·®жҜ”е’ҢеҠ жқғеј•еҜјж–№жЎҲ гҖӮ и°ғиҜ•иҝҮзЁӢдёӯ пјҢ еҸ‘зҺ°е°ҸиҪҰеҜ№дәҺејҜйҒ“зҡ„ж•Ҹж„ҹеәҰдёҚзҗҶжғі пјҢ ж•…еӨҡж¬Ўе°қиҜ•дҝ®ж”№жЁӘзәөз”өж„ҹжқғйҮҚ пјҢ жҲ–е°Ҷд»Јз ҒжҺЁзҝ»йҮҚеҶҷ пјҢ еҜ»жұӮзҗҶжғізҡ„з»“жһң гҖӮ
иҝӣиЎҢж•°ж¬Ўд»Јз ҒжҺЁзҝ»йҮҚеҶҷеҗҺ пјҢ еҒ¶з„¶дә§з”ҹдәҶдёҖж¬Ўжңҹжңӣд№ӢеӨ–зҡ„з»“жһң пјҢ е°ҸиҪҰз»•иөӣйҒ“йҖҶж—¶й’ҲиЎҢ驶пјҲеңЁи°ғж–№жЎҲпјүж—¶ пјҢ е…¶еҜ№дәҺејҜйҒ“зҡ„ж•Ҹж„ҹжҖ§е’ҢжӢҹеҗҲзЁӢеәҰйғҪеңЁйў„жңҹд№ӢдёҠ пјҢ жҲҗеҠҹиҝӣиЎҢйҖҹеәҰжөӢиҜ•еҗҺ пјҢ ејҖе§ӢзІҫи°ғеҸӮж•° гҖӮ й’ҲеҜ№е°ҸиҪҰеҜ№ејҜйҒ“ж•Ҹж„ҹеәҰи¶…еҮәйў„жңҹзҡ„зҺ°иұЎ пјҢ еҲқжӯҘйҮҮеҸ–дәҶйҷҚдҪҺж–№еҗ‘жҜ”дҫӢжҺ§еҲ¶зі»ж•°пјҲPпјүзҡ„жҺӘж–Ҫ пјҢ и°ғж•ҙеҗҺ пјҢ еҸ‘зҺ°е°ҸиҪҰеңЁдёҖдәӣйЎәж—¶й’Ҳж–№еҗ‘ејҜйҒ“дёҠзҡ„иЎҢ驶еҮәзҺ°иҫғеӨ§й—®йўҳ пјҢ й’ҲеҜ№й—®йўҳиҝӣиЎҢжҺ’жҹҘгҖҒеҲҶжһҗгҖҒж•°еӯҰи®әиҜҒеҗҺ пјҢ дә§з”ҹдәҶз”өж„ҹж–№еҗ‘жҺ§еҲ¶зҡ„е·®жҜ”е’Ңе·®еҠ жқғз®—жі• гҖӮ жң¬ж–Үд»Һй—®йўҳзҡ„еҸ‘зҺ°дёҺи§ЈеҶіеҮәеҸ‘ пјҢ иҜҰз»ҶжҸҸиҝ°з”өж„ҹж–№еҗ‘жҺ§еҲ¶зҡ„е·®жҜ”е’Ңе·®еҠ жқғз®—жі•зҡ„еҸ‘зҺ°гҖҒеҺҹзҗҶгҖҒеҸӮж•°и°ғиҜ•ж–№жі• пјҢ 并дҪҝз”ЁMATLABе»әз«ӢжЁЎеһӢи§ЈйҮҠе…¶е·ҘдҪңеҺҹзҗҶ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
1.1 з®—жі•зҡ„еҸ‘зҺ°иҝҮзЁӢз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі•жҳҜеңЁиҝӣиЎҢз”өж„ҹе·®жҜ”е’ҢеҠ жқғз®—жі•и°ғиҜ•ж—¶еҸ‘зҺ°зҡ„ гҖӮ еңЁи°ғиҜ•иҝҮзЁӢдёӯ пјҢ е»әз«Ӣз”өж„ҹе·®жҜ”е’Ңз®—жі•е…¬ејҸпјҡ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
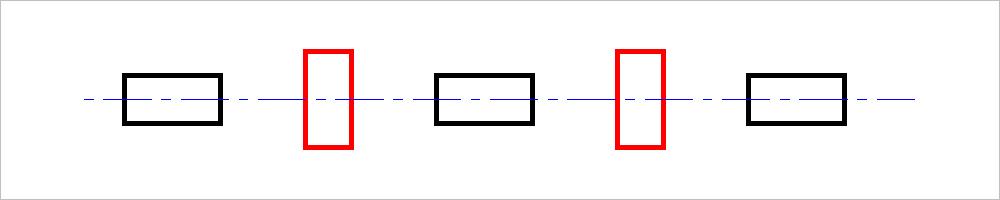
е…¬ејҸC1дёӯ пјҢ LMгҖҒRMжҳҜе·ҰдёӯгҖҒеҸідёӯдёӨдёӘз”өж„ҹиҺ·еҸ–з”өжөҒз»Ҹ硬件гҖҒиҪҜ件ж”ҫеӨ§еҗҺзҡ„иҫ“еҮәеҖј пјҢ LгҖҒRжҳҜе·ҰгҖҒеҸідёӨдёӘз”өж„ҹзҡ„иҫ“еҮәеҖј пјҢ LIMITжҳҜдёҖдёӘйҷҗе№…зі»ж•° пјҢ AгҖҒBжҳҜеҠ жқғеҸӮж•° пјҢ з”өж„ҹзҡ„жҺ’еёғж–№ејҸеҸӮиҖғеӣҫC1.1 пјҢ з”ұе·ҰеҲ°еҸіеҲҶеҲ«жҳҜL,LM,M,RM,R гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
в–І еӣҫC1.1 з”өж„ҹжҺ’еёғеӣҫ
е°Ҷе…¬ејҸC1зҡ„иҫ“еҮәиҜҜе·®иҫ“е…ҘжҷәиғҪиҪҰж–№еҗ‘жҺ§еҲ¶зі»з»ҹ пјҢ еҸ‘зҺ°е°ҸиҪҰеҜ№дәҺејҜйҒ“зҡ„жӢҹеҗҲж•Ҳжһңе·® пјҢ еӨҡж¬Ўи°ғиҠӮBеҸӮж•°гҖҒж–№еҗ‘жҺ§еҲ¶жҜ”дҫӢзі»ж•° пјҢ ејҜйҒ“жӢҹеҗҲж•ҲжһңжңүжүҖдёҠеҚҮ пјҢ дҪҶд»Қ然дёҚзҗҶжғі гҖӮ еңЁеҪ“ж—¶еҲқжӯҘеҲӨе®ҡжҳҜеҸӮж•°и°ғиҠӮзҡ„жҖқи·Ҝй”ҷиҜҜ пјҢ д»ҘеҸҠйҒҚеҺҶзЁӢеәҰжңүжүҖдёҚи¶і пјҢ ж•…еӨҡж¬ЎйҮҚж–°иҝӣиЎҢж•°еӯҰжҺЁжј”гҖҒеҸӮж•°йҒҚеҺҶ пјҢ е°қиҜ•иҺ·еҫ—жӣҙдјҳзҡ„з»“жһң гҖӮ
дёҖж¬Ўз®—жі•жҺЁеҖ’еҗҺзҡ„еҸӮж•°йҒҚеҺҶдёӯеҒ¶з„¶дә§з”ҹдәҶйҖҶж—¶й’ҲиЎҢ驶时ејҜйҒ“зҡ„ж•Ҹж„ҹжҖ§гҖҒжӢҹеҗҲзЁӢеәҰй«ҳдәҺйў„жңҹзҡ„зҺ°иұЎ гҖӮ дёәеўһејәејҜйҒ“жӢҹеҗҲж•Ҳжһң пјҢ йҖӮеҪ“зҡ„йҷҚдҪҺдәҶжҜ”дҫӢзі»ж•° пјҢ дҪҶи°ғж•ҙеҗҺдә§з”ҹдәҶйЎәж—¶й’ҲиЎҢ驶еӣ°йҡҫгҖҒSеһӢејҜйҒ“йҡҫд»ҘжӢҹеҗҲгҖҒеӨ§еҚҠеҫ„ејҜйҒ“еҲҮеӨ–зҺҜиЎҢ驶зӯүй—®йўҳ гҖӮ еҜ№й—®йўҳиҝӣиЎҢжҺ’жҹҘ пјҢ еҸ‘зҺ°еңЁеӨҚеҲ¶гҖҒзІҳиҙҙж—¶еҒ¶з„¶е°Ҷз®—жі•е…¬ејҸеҶҷжҲҗпјҡ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
е…¬ејҸC2зҡ„е·ҰеҸідёҚеҜ№з§°жҖ§йҖ жҲҗдәҶе°ҸиҪҰдәҺйҖҶж—¶й’ҲпјҲLM>RMпјүиөӣйҒ“зҡ„йҖӮеә”жҖ§иүҜеҘҪ пјҢ еҚҙеҜ№йЎәж—¶й’ҲиөӣйҒ“йҖӮеә”жҖ§е·®зҡ„зҺ°иұЎ гҖӮ еҜ№дәҺжҺ’жҹҘеҗҺдә§з”ҹзҡ„й—®йўҳ пјҢ жІЎжңүз«ӢеҲ»иҝӣиЎҢдҝ®еӨҚеӨ„зҗҶ пјҢ иҖҢжҳҜе…ҲеҜ№е…¶йҖҶж—¶й’ҲиөӣйҒ“зҡ„иүҜеҘҪйҖӮеә”жҖ§иҝӣиЎҢдәҶеҲҶжһҗ гҖӮ
йҰ–е…Ҳе°қиҜ•еҜ№й”ҷиҜҜз®—жі•йҖҶж—¶й’ҲиөӣйҒ“иүҜеҘҪйҖӮеә”жҖ§зҡ„дә§з”ҹиҝӣиЎҢзҗҶи®әеҒҮи®ҫ пјҢ еҪ“е°ҸиҪҰе…ҘејҜж—¶ пјҢ з”өж„ҹе·®жҜ”е’ҢеҠ жқғз®—жі•дёӯдҪҚдәҺеҲҶеӯҗдёҠеҠ жқғзҡ„(LM+RM)еўһеӨ§ пјҢ еҜјиҮҙerrдә§з”ҹеҮҸе°Ҹи¶ӢеҠҝ пјҢ иҜҘеҮҸе°Ҹи¶ӢеҠҝеҜјиҮҙз”өж„ҹе·®жҜ”е’ҢеҜ№дәҺејҜйҒ“зҡ„ж•Ҹж„ҹеәҰдёӢйҷҚ гҖӮ иҖҢеҪ“жҠҠеҲҶжҜҚдёҠзҡ„(LM+RM)ж”№дёә(LM-RM)еҗҺ пјҢ е°ҸиҪҰе…ҘејҜж—¶errзҡ„еҲҶжҜҚеўһеӨ§и¶ӢеҠҝжҳҫ然дёӢйҷҚ пјҢ errдә§з”ҹзҡ„еҮҸе°Ҹи¶ӢеҠҝжӣҙејұ гҖӮ еӣ жӯӨ пјҢ е°ҸиҪҰеҜ№йҖҶж—¶й’ҲиөӣйҒ“зҡ„йҖӮеә”жҖ§еўһејәдәҶ гҖӮ
жҺЁиҚҗйҳ…иҜ»

















- е°Ҹзұі11иғҪжЈҖжөӢеҝғзҺҮпјҡеҮҶзЎ®еәҰе ӘжҜ”жҷәиғҪжүӢиЎЁ
- иҒ”жғіеҸ‘еёғжҷәиғҪзңјй•ң ThinkReality A3
- зғҹеҸ°жёҜвҖңз®ЎйҒ“жҷәи„‘зі»з»ҹвҖқдёҠзәҝ еңЁеӣҪеҶ…зҺҮе…Ҳе®һзҺ°еҺҹжІ№еӮЁиҝҗе…ЁжҒҜжҷәиғҪжҺ’дә§
- е”җеұұеӣӣз»ҙжҷәиғҪ科жҠҖжңүйҷҗе…¬еҸёпјҡеҸҢиҮӮжңәеҷЁдәәеј•йўҶдәәжңәеҚҸдҪңж–°зәӘе…ғ
- з”өи„‘жҠҘ2020е№ҙеәҰиҺ·еҘ–дә§е“Ғпјҡеј•йўҶжҷәиғҪе•ҶеҠЎж— зәҝжҠ•еҪұж—¶д»Јзҡ„жҳҺеҹәEзі»еҲ—е•ҶеҠЎжҠ•еҪұжңә
- е…іжіЁ | 马ж–Ҝе…ӢзӘҒ然宣еёғпјҡзү№ж–ҜжӢүжҲ–е°ҶиҝҺжқҘйҰ–еұҠвҖңдәәе·ҘжҷәиғҪж—ҘвҖқ
- иҒ”жғіжӯЈејҖеҸ‘дёӢдёҖд»ЈThinkRealityжҷәиғҪзңјй•ң
- 199е…ғ е°Ҹзұіжңүе“Ғдј—зӯ№жҷәиғҪеҒҘи…№иҪ®пјҡLEDж•°жҳҫ иҪ»жқҫз»ғеҮә马甲зәҝ
- жҷәиғҪжүӢжңәж—¶д»ЈпјҢз”өжұ и¶ҠжқҘи¶ҠдёҚз»Ҹз”ЁпјҢжҖҺд№Ҳе……з”өжүҚиғҪ延й•ҝз”өи§ҶеҜҝе‘Ҫпјҹ
- дәәе·ҘжҷәиғҪ|йә»иҫЈиҙўз»ҸпјҡжҲ‘еӣҪвҖңз®—еҠӣвҖқеўһй•ҝиҝ…йҖҹпјҢжңүеҠӣж”Ҝж’‘дәәе·ҘжҷәиғҪеҸ‘еұ•