жҷәиғҪиҪҰз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі•з ”з©¶( еӣӣ )
е…¶ж¬Ў пјҢ е°қиҜ•еҜ№ж°ҙе№із”өж„ҹе·®жҜ”е’ҢеҒҸзҪ®з®—жі•иҝӣиЎҢдәҶе»әжЁЎ пјҢ е…¬ејҸеҰӮдёӢ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
е°Ҷдёӯй—ҙдёӨзәөеҗ‘з”өж„ҹзҡ„е·®еҖјд№ҳд»Ҙ1/3000жүҚеҫ—еҲ°дёҖжқЎдёҚй”ҷзҡ„жӣІзәҝ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
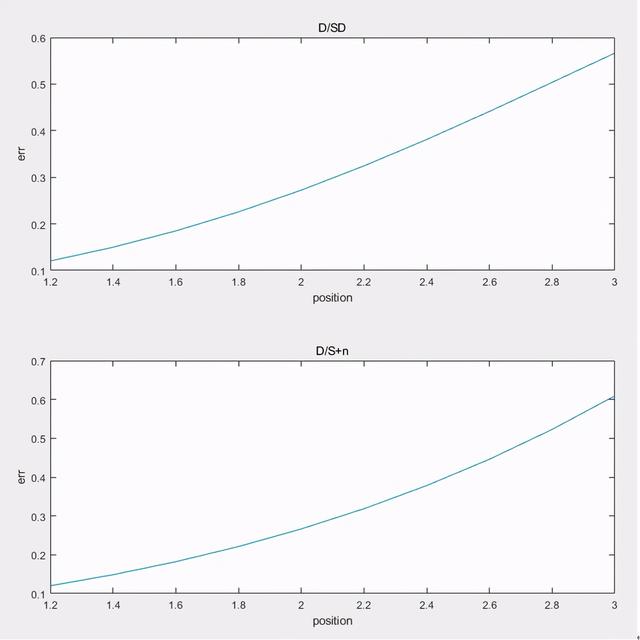
в–І еӣҫC2.4 жӣІзәҝеҜ№жҜ”
еӣҫC2.4дёӯ пјҢ е·®жҜ”е’ҢеҒҸзҪ®з®—жі•зҡ„еҶ…зҺҜеҢәж•°жҚ®ж–ңзҺҮиҰҒе°ҸдәҺе·®жҜ”е’Ңе·®еҠ жқғз®—жі• пјҢ иҖҢжӣІзҺҮеҸҲжӣҙеӨ§ пјҢ е°ҸиҪҰжӣҙйҡҫеҲҮеҶ…зҺҜиЎҢ驶 гҖӮ еҰӮжһңжғіи®©е°ҸиҪҰеҲҮеҶ…зҺҜиЎҢ驶 пјҢ е°ұйңҖиҰҒеўһеҠ дёӯй—ҙдёӨзәөз”өж„ҹзҡ„жқғеҖј пјҢ дҪҶжҳҜеҰӮжһңз®—жі•зҡ„жӣІзәҝеҮәзҺ°дәҶе·®жҜ”е’ҢеҠ жқғз®—жі•зҡ„еҶ…зҺҜеҢәеҸҚеўһзҡ„и¶ӢеҠҝ пјҢ еҲҷдјҡдә§з”ҹиҝҮи°ғжҠ–еҠЁ пјҢ е®№жҳ“еҶІеҮәиөӣйҒ“пјӣиӢҘжҳҜеҮәзҺ°дәҶжӣІзҺҮиҝҮеӨ§зҡ„жғ…еҶө пјҢ йӮЈд№Ҳе°ҸиҪҰе°ұжӣҙйҡҫеҲҮеҶ…зҺҜиЎҢ驶 гҖӮ
е·®жҜ”е’ҢжүҖиҫ“еҮәиҜҜе·®еҖјжӣІзәҝжӣҙеҠ иҙҙеҗҲдёҖж¬ЎжӣІзәҝ пјҢ иғҪеӨҹж”ҜжҢҒе°ҸиҪҰе…ҘејҜеҲҮеҶ…зҺҜиЎҢ驶 пјҢ иҖҢе…¶д»–еҫҲеӨҡз®—жі•ж— жі•еҒҡеҲ°иҝҷдёҖзӮ№ пјҢ иҝҷд№ҹжҳҜе·®жҜ”е’Ңе·®з®—жі•еҮәиүІзҡ„дјҳеҠҝд№ӢдёҖ гҖӮ
2.5 е°Ҹз»“жң¬з« д»ҺдёҚеҗҢи§’еәҰе…ҘжүӢ пјҢ з”Ёеҗ„з§Қж–№ејҸиҜҒжҳҺдәҶз”өж„ҹе·®жҜ”е’Ңе·®з®—жі•еҜ№ејҜйҒ“йҒ“еһӢжңүзқҖиүҜеҘҪзҡ„дәІе’ҢеәҰ пјҢ еҗҢж—¶д№ҹе…·жңүеҫҲй«ҳзҡ„зЁіе®ҡжҖ§пјӣиҜҒжҳҺдәҶз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі•зӣёиҫғдәҺз”өж„ҹе·®жҜ”е’ҢеҠ жқғз®—жі• пјҢ ж°ҙе№із”өж„ҹе·®жҜ”е’ҢеҒҸзҪ®з®—жі•зҡ„дјҳеҠҝ гҖӮ
йҷӨжӯӨд№ӢеӨ– пјҢ з”өж„ҹе·®жҜ”е’Ңе·®з®—жі•з”ұдәҺеҲҶжҜҚзҡ„еҮҸе°Ҹ пјҢ е…¶иҫ“еҮәиҜҜе·®жүҖйңҖзҡ„жҜ”дҫӢзі»ж•°д№ҹжңүжүҖдёӢйҷҚ пјҢ е°ҸиҪҰеңЁй•ҝзӣҙйҒ“еһӢдёҠиЎҢ驶时зҡ„жҠ–еҠЁд№ҹдјҡжңүжүҖдёӢйҷҚ гҖӮ йңҖиҰҒжіЁж„Ҹзҡ„жҳҜз”өж„ҹе·®жҜ”е’Ңе·®зӣёиҫғдәҺз”өж„ҹе·®жҜ”е’ҢеҠ жқғз®—жі• пјҢ иөӣйҒ“йҖӮеә”жҖ§жңүжүҖдёӢйҷҚ пјҢ йңҖиҰҒеҜ№еҗ„йЎ№еҸӮж•°жҠ•е…ҘжӣҙеӨҡе…іжіЁ гҖӮ
зӣҙжҺҘи°ғиҠӮз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі• пјҢ еҸҜиғҪдјҡеӣ ж— жі•зӣҙи§Ӯзҡ„дәҶи§Јеҗ„еҸӮж•°иҖҢиө°ејҜи·Ҝ пјҢ ж•…е»әи®®е…Ҳи°ғеҮәдёҖеҘ—зӣёеҜ№зЁіе®ҡзҡ„з”өж„ҹе·®жҜ”е’ҢеҠ жқғж–№жЎҲ пјҢ 然еҗҺе°Ҷе…¶ж”№еҶҷдёәз”өж„ҹе·®жҜ”е’Ңе·®еҠ жқғз®—жі• гҖӮ иҝҷж ·еҒҡзҡ„зҗҶи®әдҫқжҚ®жңүдәҢ пјҢ е…¶дёҖ пјҢ й•ҝзӣҙйҒ“дёҠ пјҢ зәөеҗ‘з”өж„ҹеҖјжҺҘиҝ‘дәҺйӣ¶ пјҢ дёӨз®—жі•е·®и·қдёҚдјҡеӨӘеӨ§ гҖӮ 第дәҢ пјҢ з”ұ第дәҢз« жүҖе»әз«Ӣзҡ„жЁЎеһӢдёӯеҸҜд»ҘзңӢеҮә пјҢ е°ҸиҪҰжІҝдёӯзәҝиЎҢ驶时 пјҢ дёӨеҠ жқғз®—жі•зҡ„иҫ“еҮәиҜҜе·®жӣІзәҝзӣёдјј пјҢ е·®жҜ”е’Ңе·®еҠ жқғз®—жі•зҡ„еҸӮж•°еҸҜз”ұе·®жҜ”е’ҢеҠ жқғз®—жі•еҸӮж•°еҫ®и°ғиҺ·еҫ— гҖӮ
3.2дҝ®еӨҚиҝҮи°ғд»Ҙз”өж„ҹе·®жҜ”е’ҢеҠ жқғз®—жі•и°ғиҜ•еҮәдёҖеҘ—ж…ўйҖҹзЁіе®ҡзҡ„ж–№жЎҲеҗҺ пјҢ е°Ҷз®—ејҸж”№еҶҷдёәе·®жҜ”е’Ңе·®еҠ жқғз®—жі• пјҢ жӯӨж—¶з”ұдәҺеҲҶеӯҗзҡ„дёӢйҷҚ пјҢ е°ҸиҪҰеңЁејҜйҒ“йҒ“еһӢеҮәзҺ°е°Ҹе№…еәҰиҝҮи°ғ гҖӮ жӯӨж—¶иҪ»еҫ®йҷҚдҪҺжҜ”дҫӢзі»ж•°пјҲзәҰдёәе·®жҜ”е’ҢеҠ жқғз®—жі•зҡ„0.7еҲ°0.8еҖҚпјүеҚіеҸҜе®Ңе…ЁжӢҹеҗҲ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
[1]ж®·еү‘е®Ҹ пјҢ еҗҙејҖдәҡ.еӣҫи®әеҸҠе…¶з®—жі•[M].дёӯеӣҪ科еӯҰжҠҖжңҜеӨ§еӯҰеҮәзүҲзӨҫ,2003.
[2]еҚ“жҷҙ,й»„ејҖиғң,йӮөиҙқиҙқ.еӯҰеҒҡжҷәиғҪиҪҰпјҡжҢ‘жҲҳ"йЈһжҖқеҚЎе°”"жқҜ[M].еҢ—дә¬:еҢ—дә¬иҲӘз©әиҲӘеӨ©еӨ§еӯҰеҮәзүҲзӨҫ,2007.
[3]зҺӢзӣје®қдё»зј–.жҷәиғҪиҪҰеҲ¶дҪң[M].еҢ—дә¬:жё…еҚҺеӨ§еӯҰеҮәзүҲзӨҫ,2017.
[4]и°ӯжө©ејәи‘—.CзЁӢеәҸи®ҫи®Ў[M].еҢ—дә¬:жё…еҚҺеӨ§еӯҰеҮәзүҲзӨҫ,2003.
[5]еј ж–ҮжҳҘ.жұҪиҪҰзҗҶи®ә[M].еҢ—дә¬:жңәжў°е·ҘдёҡеҮәзүҲзӨҫ.2005.
жҺЁиҚҗйҳ…иҜ»


















- е°Ҹзұі11иғҪжЈҖжөӢеҝғзҺҮпјҡеҮҶзЎ®еәҰе ӘжҜ”жҷәиғҪжүӢиЎЁ
- иҒ”жғіеҸ‘еёғжҷәиғҪзңјй•ң ThinkReality A3
- зғҹеҸ°жёҜвҖңз®ЎйҒ“жҷәи„‘зі»з»ҹвҖқдёҠзәҝ еңЁеӣҪеҶ…зҺҮе…Ҳе®һзҺ°еҺҹжІ№еӮЁиҝҗе…ЁжҒҜжҷәиғҪжҺ’дә§
- е”җеұұеӣӣз»ҙжҷәиғҪ科жҠҖжңүйҷҗе…¬еҸёпјҡеҸҢиҮӮжңәеҷЁдәәеј•йўҶдәәжңәеҚҸдҪңж–°зәӘе…ғ
- з”өи„‘жҠҘ2020е№ҙеәҰиҺ·еҘ–дә§е“Ғпјҡеј•йўҶжҷәиғҪе•ҶеҠЎж— зәҝжҠ•еҪұж—¶д»Јзҡ„жҳҺеҹәEзі»еҲ—е•ҶеҠЎжҠ•еҪұжңә
- е…іжіЁ | 马ж–Ҝе…ӢзӘҒ然宣еёғпјҡзү№ж–ҜжӢүжҲ–е°ҶиҝҺжқҘйҰ–еұҠвҖңдәәе·ҘжҷәиғҪж—ҘвҖқ
- иҒ”жғіжӯЈејҖеҸ‘дёӢдёҖд»ЈThinkRealityжҷәиғҪзңјй•ң
- 199е…ғ е°Ҹзұіжңүе“Ғдј—зӯ№жҷәиғҪеҒҘи…№иҪ®пјҡLEDж•°жҳҫ иҪ»жқҫз»ғеҮә马甲зәҝ
- жҷәиғҪжүӢжңәж—¶д»ЈпјҢз”өжұ и¶ҠжқҘи¶ҠдёҚз»Ҹз”ЁпјҢжҖҺд№Ҳе……з”өжүҚиғҪ延й•ҝз”өи§ҶеҜҝе‘Ҫпјҹ
- дәәе·ҘжҷәиғҪ|йә»иҫЈиҙўз»ҸпјҡжҲ‘еӣҪвҖңз®—еҠӣвҖқеўһй•ҝиҝ…йҖҹпјҢжңүеҠӣж”Ҝж’‘дәәе·ҘжҷәиғҪеҸ‘еұ•