激光雷达、相机…万字长文带你入门无人驾驶车硬件(12)
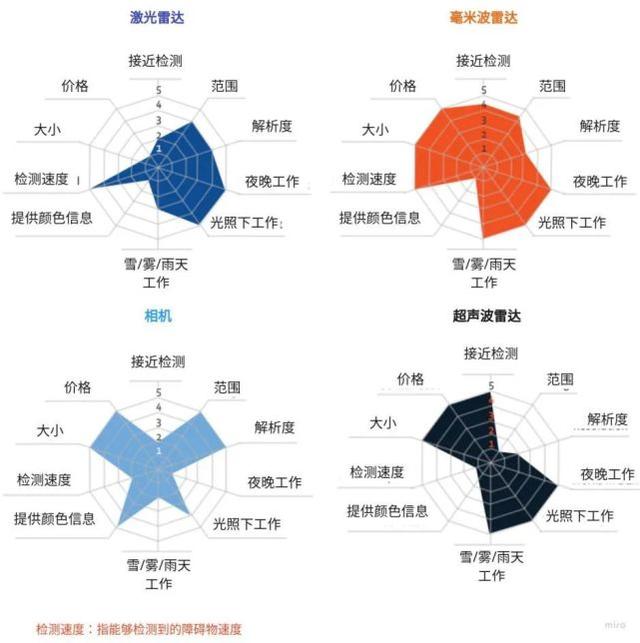
总之 , 每种传感器都有它的优点和缺点 , 只能通过适当的传感器冗余和传感器融合来得到近似完美的视野 。
 文章插图
文章插图
图 2.25 不同传感器对比
2.6.3 操控
我们到底需要什么样的汽车底盘?是采用现有的设计还是直接跳过去生产下一代 。 下面我们来看下无人驾驶车的操控 。
 文章插图
文章插图
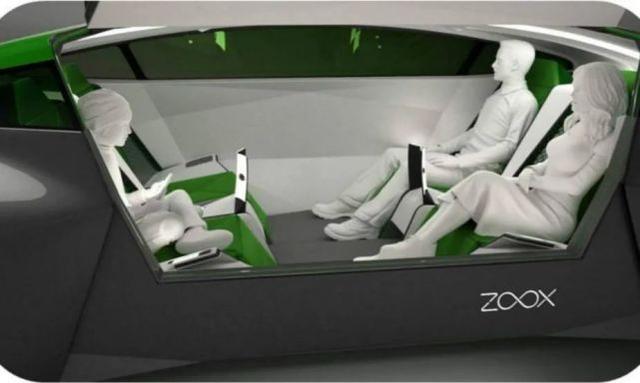
图 2.26 Zoox 无人驾驶车
Zoox 对汽车操控的设计非常超前 , 平时我也有这种想法 , 为什么每次停车的时候都要倒车进去 , 而不是直接开进去呢?Zoox 就是为了解决这个问题而生的 , Zoox 认为汽车有前后之分是人类的操控习惯 , 机器不存在这个问题 , 机器可以同时控制前轮 , 甚至后轮的方向 , 机器不需要汽车区别前进和后退 。 因此 Zoox 生产的车是没有方向的 , 甚至凭借车内的座椅也区分不出前后 。 如图 2.27 所示 。
 文章插图
文章插图
图 2.27 Zoox 的无人驾驶车设计
从人类的角度我们确实难以接受没有方向的车 , 但是可以同时控制前轮和后轮 , 车的操控确实简单了很多 。
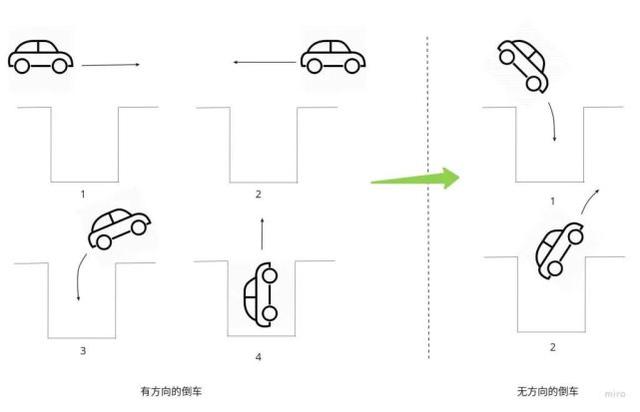
1. 倒车的时候方便了很多
如果是传统有方向的车 , 我们先要开车过去 , 然后再分为 4 步倒车入库 , 如图 2.28 所示 。 而无方向的车就简单多了 , 停车的时候直接开车进去 , 离开的时候直接开车出来 , 因为没有方向 , 向前和向后行驶对机器来说没有任何区别 。
 文章插图
文章插图
图 2.28 停车示意图
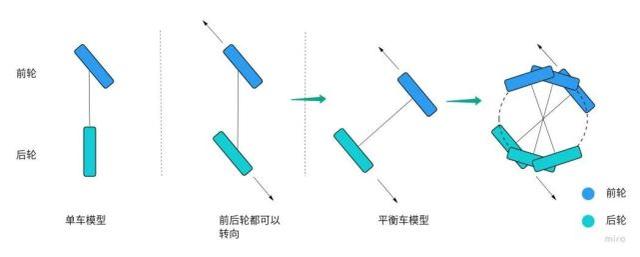
2. 可以原地转弯
当前的汽车转向模型可以抽象为单车模型 , 也就是前轮转向 。 如图 2.29 所示 , 假设车的后轮也可以转向 , 就可以把汽车转向模型抽象成 2 轮自平衡小车 , 实现原地 360° 转向 。 学车的时候最怕一会前进档 , 一会倒挡 , 很容易搞混往哪个方向打方向盘 , 而机器就不存在这样的问题 。 前后轮都可以转向的好处是可以实现原地转弯 , 以后再也不用担心狭窄路段掉不过头来的情况 。
 文章插图
文章插图
图 2.29 转弯示意图
Zoox 专门为机器而设计的下一代操控为无人驾驶操控系统提供了新的思路 , 未来无人驾驶车也许会采用这种设计 。
2.6.4 性能
无人驾驶车在提升性能的同时要控制功耗 , 保证性能和功耗的平衡 。
1. 提升性能
人们一直希望汽车性能强劲 , 同时功耗很低 。 半导体行业一直遵循着摩尔定律 , 即每 2 年的性能翻一番 。 摩尔定律促进了整个 PC 时代的发展 , 但摩尔定律将要失效了 , 目前硅基的制程最多到 7nm , 再往前进一步已经相当困难 。 因为距离近了会漏电 , 击穿硅晶体 , 导致芯片良品率太低 。 制程的降低首先可以减少功耗 , 其次可以提升性能 , 目前来看由于摩尔定律的失效 , 通用 CPU 的性能会在很长一段时间内陷入停滞状态 。
要提升性能 , 可以采用专门用来处理神经网络的芯片 , 比如 TPU , 可以超快地处理神经网络大量的乘法和加法运算 , 而且耗电量显著降低 。 也可以采用 FPGA 和专用 ASIC 芯片 , 把传感器融合算法和底层算法融入硬件 , 促进无人车系统的模块化发展 。
2. 功耗的影响
接着再看功耗对无人车的影响 。 首先带来的影响是供电 , 功耗太高会影响无人车的续航 。 以无人车实时的运算开销为 2KW 估算 , 无人车的电池容量为 75kWh (千瓦时) , 那么电池可以使用的时长是 37.5 小时 。 这还仅仅是运算的开销 , 还没有算车本身的动力开销 。 由于能源紧张 , 无人车需要考虑限制功耗 。
推荐阅读
















- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机