激光雷达、相机…万字长文带你入门无人驾驶车硬件(11)
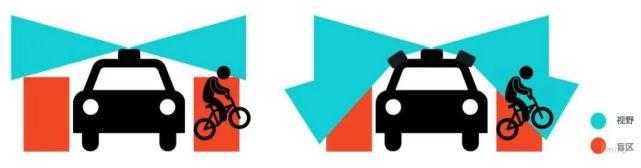
图 2.20 卡车和小汽车的视野对比
除了汽车型号带来的视野差异之外 , 传感器数量太少也会导致视野盲区 , 增加多个传感器可以解决这个问题 。 如图 2.21 所示 , 针对 1 个激光雷达出现的视野盲区 , 在无人车的左右分别增加 1 个激光雷达之后 , 扩大了视野范围 。
 文章插图
文章插图
图 2.21 激光雷达视野盲区
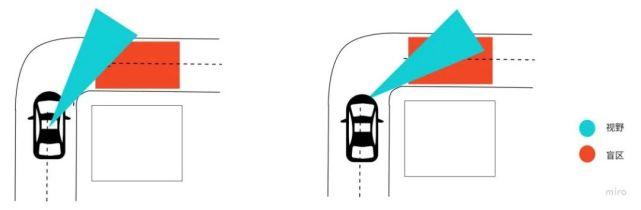
另外传感器的位置也影响到无人驾驶车的视野范围 。 在路口拐弯处 , 特别是一些盘山公路 , 传感器的位置在车的中部和前部展现的视野范围也不一样 。 如图 2.22 所示 , 安装在车前部位置的传感器可以更早的发现障碍物 。
 文章插图
文章插图
图 2.22 不同安装位置的传感器视野范围对比
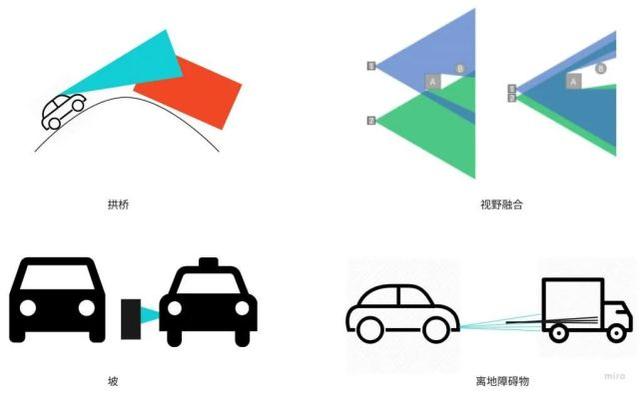
除了这些考验之外 , 还面临其它一些特殊场景的视野挑战 。 当汽车通过拱桥时即使在车头位置安装有传感器 , 由于车的俯仰角度 , 也很难发现障碍物;传感器的位置也可能带来视野融合的问题 , 比如激光雷达看到了障碍物 B 而摄像头没有看到 , 融合的时候不能确定以哪个传感器的结果为准;由于毫米波雷达的垂直视野很窄 , 由坡导致的遮挡问题发现不了障碍物;另外当遇到特殊情况如:卡车拖着钢筋、树木等 , 由于障碍物很稀疏 , 靠雷达很难确认这类障碍物 。 上述场景分别如图 2.23 所示 。
 文章插图
文章插图
图 2.23 特殊场景视野盲区示例
最好的办法是开发一款工具来识别汽车的视野盲区 , 在工具中设置好传感器的位置之后 , 可以查看汽车视野盲区有多大 , 从而帮助工程师确定无人车传感器的个数和位置 。
2. 如何做到远距离视野
看的远的好处在于车在高速行驶过程中 , 可以更早的发现潜在的危险 。 距离越远激光雷达采集到的点就越稀疏 , 目前激光雷达最远的视野范围是 100-150m 左右 。 摄像头和毫米波雷达的视野范围更远 , 采用摄像头可以看到约 1000m 左右的视野 。
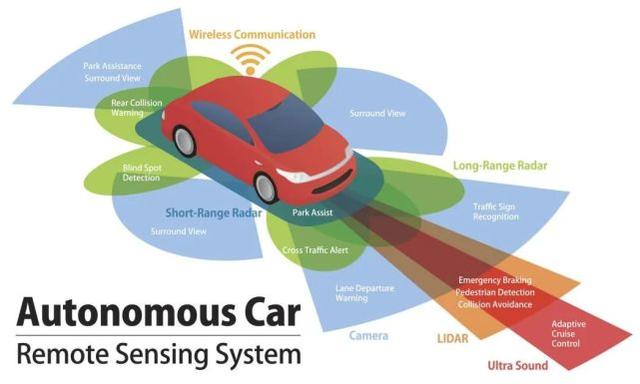
综上 , 通过激光雷达、毫米波雷达和摄像头冗余搭配 , 无人驾驶车既能获取远距离的视野 , 又能兼顾 360° 的视野范围 。 如图 2.24 所示 , 展示了无人车整体合理的传感器布置 , 保证无人车获取足够安全的视野范围 。
 文章插图
文章插图
图 2.24 无人车整体传感器布置
3. 天气对视野的影响
天气对视野的影响有 2 方面:一是会影响视野可见性 , 二是影响视野范围 。 下面我们来分析天气对传感器的视野有哪些影响 。
雾霾 。 雾霾对激光雷达的影响最大 , 因为激光的波长和雾霾颗粒的大小差不多 , 穿透不了雾霾 。 同时摄像头在雾霾的时候也会影响视野范围 , 而毫米波的波长较长 , 可以绕过雾霾颗粒 , 受到的影响较小 。
下雨 。 下雨对摄像头的影响比较大 , 下雨会使得镜头模糊 , 如果雨很大 , 只能依赖车内的摄像头 。 下雨对激光雷达和毫米波雷达的影响相对比较小 。
光照 。 光照对摄像头的影响最大 , 当强光照射(对面远光灯直射) , 光线很暗(夜晚)或者光照突然变化(隧道出口)的时候 , 都会导致摄像头失灵 。 目前有一些研究为了解决光照对摄像头的影响 , 一种方法是对摄像头做处理 , 来适应不同的曝光率 , 另外一种方法是提取光照不变特征 , 即使环境光照变化 , 也不会影响这些特征的提取 。 由于激光雷达是主动发射型设备 , 所以光照的变化对激光雷达影响不大 。 毫米波雷达发射的是电磁波 , 可见光对毫米波雷达几乎没有影响 。
下雪 。 下雪对摄像头 , 激光雷达 , 毫米波雷达都有影响 。
推荐阅读
















- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机