激光雷达、相机…万字长文带你入门无人驾驶车硬件( 十 )
可以预见未来 V2X 对自动驾驶会是一个非常好的补充 。
2.5.3 黑匣子
1. 什么是黑匣子?
事件数据记录器 (EDR) 是用于记录汽车驾驶状态的设备 。 在现代的柴油卡车中 , EDR 在发动机出现故障或车速陡然变化的时候触发记录数据 。 在发生车祸之后收集来自 EDR 的信息 , 并对其进行分析 , 以确定事故发生的原因 。 EDR 一般将信息记录在防篡改的读写设备中 。
2. 原理
一些 EDR 不停的存储数据 , 覆盖几分钟之前写入的数据 , 直到发生车祸之后停止覆盖 。 还有一些 EDR 通过在碰撞之前的一些征兆例如速度突然变化触发写入数据 , 直到发生事故之后结束 。 EDR 会录制多方面的数据 , 包括是否使用了制动、撞击时候的速度、转向角以及座椅安全带状态等 。 虽然本地可以存储数据 , 但是一些车还是会把数据上传到远程的数据中心进行分析和保存 。
3. 应用场景
EDR 主要用来分析事故原因 , 以及提供事故发生时候的法律依据 。 目前行车记录仪实际上已经具备了部分的记录功能 , 并且可以作为交通事故的证据 。
在无人驾驶领域 , 黑匣子的主要目的是为了记录事故发生的原因 , 用来分析无人驾驶车是否做出了错误的决定 。 当然无人驾驶车需要保存的信息可能更多 , 用以方便跟踪问题 。
2.6 总结
硬件可以理解为人的大脑和骨骼 , 而软件则是人的思想 。 无人驾驶硬件需要具备哪些特性呢?下面主要从外观、视野、操控、性能和适应性 5 个方面来介绍对无人驾驶硬件的要求 。
2.6.1 外观
无人驾驶车上加装的钢骨架和传感器很影响汽车的美观 , 作为无人驾驶从业人员 , 可能慢慢接受了这种外观 , 但要让大众能够接受这种审美 , 还有漫长的路要走 。 人们不会为丑的东西买单 , 随着无人驾驶定制车型的出现 , 无人车的外观比之前已经有了很大的改观 。
如图 2.17 所示 , 左图为第一代无人车 , DARPA 挑战赛上夺冠的无人车 "Stanley" , 右图为 Waymo 最新的无人驾驶车 。
 文章插图
文章插图
图 2.17 无人车 quot;Stanley"(左)Waymo 无人车(右)
有什么车不那么在乎外观呢?卡车 。 由于卡车不是私人所有 , 主要是考虑运输功能 , 所以卡车可以相对任意的架设设备 , 比较少的考虑外观 。 图 2.18 所示为 OTTO 公司的无人驾驶卡车 。
 文章插图
文章插图
图 2.18 OTTO 公司的无人驾驶卡车
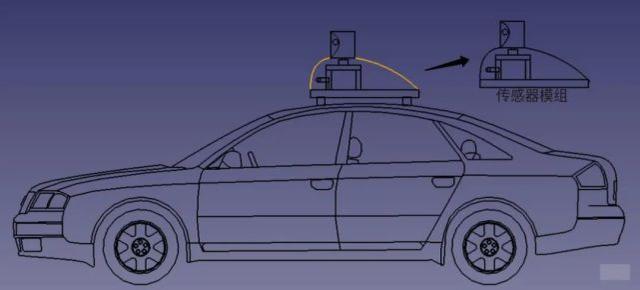
接下来再看如何设计无人车车顶的传感器模组 , 为什么希望能够模块化传感器模组呢?显而易见的场景是采集地图 , 如果在车上安装支架 , 需要先改装车 , 之后再安装传感器 , 最后再把车开到目的地去采集地图 。 如果地图采集车在深圳 , 客户在北京 , 车开过去的成本太高了 。 如果能集成好传感器模组 , 把模块快递过去 , 再安装到车上 , 对方只需要接一个电脑 , 通过简单的校正就可以工作了 , 成本相对低很多 。 传感器模组如图 2.19 所示 。
 文章插图
文章插图
图 2.19 传感器模组示意图
2.6.2 视野
无人驾驶车一个很重要的方面是视野 , 看的更广和看的更远 , 这是无人驾驶车安全的重要保障 。
1. 如何做到全视野
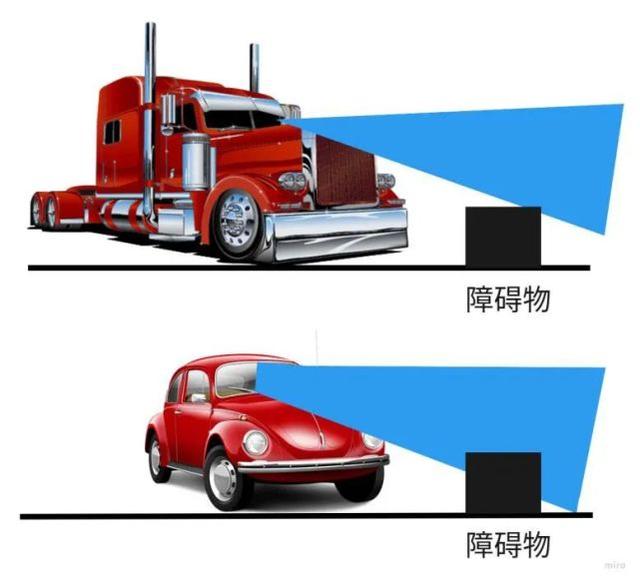
如果可以 , 我们希望无人驾驶车具有 360° 的视野范围 。 拿卡车和小汽车举例子 , 如图 2.20 所示 , 可以看到卡车的视野盲区是很大的 , 之前有交通事故报道 , 在卡车停车后 , 贴近车头有行人通过 , 这时候行人在司机的视野盲区 , 卡车司机看不到行人启动卡车后导致车祸 。
 文章插图
文章插图
推荐阅读






![[金灿荣]渤海湾举行大规模军演,金灿荣点评十分中肯:第一岛链内没有对手](http://img88.010lm.com/img.php?https://image.uc.cn/s/wemedia/s/2020/1b87993fcc56bd9c90fe2a6f6280f14f.jpg)









- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机