RS485和CAN总线比较有什么特点?总结了6点,可帮你了解
最近有朋友后台问 , 现在工业物联网发展那么快 , 总线格式那么多 , CAN相对于其他的总线有什么特点呢?为了方便解答这个问题 , 可以用我们耳熟能详的RS485总线来做一下比较 , 下面一起来看看CAN总线与RS485的比较 , 两者到底有什么不一样 。
 文章插图
文章插图
CAN总线与RS485的比较:
1、速度与距离:
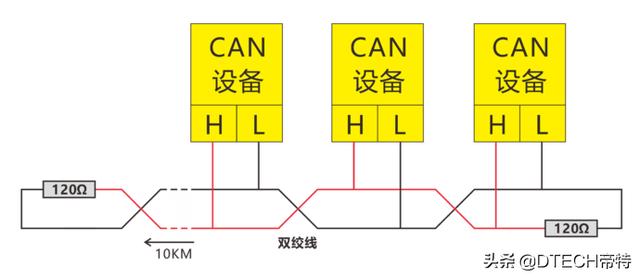
CAN与RS485以1Mbit/S的高速率传输的距离都不超过100M , 可谓高速上的距离差不多 。 但是在低速时CAN以5Kbit/S时 , 距离可达10KM , 而485再低的速率也只能到1219米左右(都无中继) 。 可见CAN在长距离的传输上拥有绝对的优势 。
 文章插图
文章插图
【RS485和CAN总线比较有什么特点?总结了6点,可帮你了解】2、总线利用率:
RS485是单主从结构 , 就是一个总线上只能有一台主机 , 通讯都由它发起的 , 它没有下命令 , 下面的节点不能发送 , 而且要发完即答 , 收到答复后 , 主机才向下一个节点询问 , 这样是为了防止多个节点向总线发送数据 , 而造成数据错乱 。 而CAN-bus是多主从结构 , 每个节点都有CAN控制器 , 多个节点发送时 , 以发送的ID号自动进行仲裁 , 这样就可以实现总线数据不错乱 , 而且一个节点发完 , 另一个节点可以探测到总线空闲 , 而马上发送 , 这样省去了主机的询问 , 提高了总线利用率 , 增强了快速性 。 所以在汽车等实性要求高的系统 , 都是用CAN总线 , 或者其他类似的总线 。
 文章插图
文章插图
3、错误检测机制:
错误检测机制 , RS485只规定了物理层 , 而没有数据链路层 , 所以它对错误是无法识别的 , 除非一些短路等物理错误 。 这样容易造成一个节点破坏了 , 拼命向总线发数据(一直发1) , 这样造成整个总线瘫痪 。 所以RS485一旦坏一个节点 , 这个总线网络都挂 。 而CAN总线有CAN控制器 , 可以对总线任何错误进行检测 , 如果自身错误超过128个 , 就自动闭锁 。 保护总线 。 如果检测到其他节点错误或者自身错误 , 都会向总线发送错误帧 , 来提示其他节点 , 这个数据是错误的 。 大家小心 。 这样CAN总线一旦有一个节点CPU程序跑飞了 , 它的控制器自动闭锁 。 保护总线 。 所以在安全性要求高的网路 , CAN是很强的 。
 文章插图
文章插图
4、价格与培训成本:
CAN器件的价格大约是485的2倍这样 , 485的通讯从软件上是很方便的 , 只要懂串行通讯 , 就可以编程 , 而CAN需要底层工程师了解CAN复杂的层 , 编写上位机软件也要了解CAN的协议 。 可谓培训成本较高 。
 文章插图
文章插图
5、总线问题:
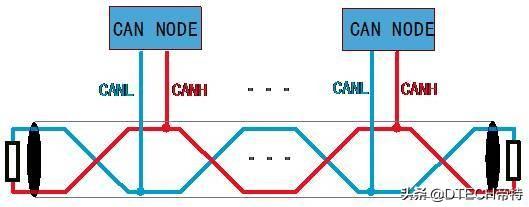
CAN总线通过CAN控制器接口芯片82C250的两个输出端CANH和CANL与物理总线相连 , 而CANH端的状态只能是高电平或悬浮状态 , CANL端只能是低电平或悬浮状态 。 这就保证不会出现象在RS-485网络中 , 当系统有错误 , 出现多节点同时向总线发送数据时 , 导致总线呈现短路 , 从而损坏某些节点的现象 。 而且CAN节点在错误严重的情况下具有自动关闭输出功能 , 以使总线上其他节点的操作不受影响 , 从而保证不会出现象在网络中 , 因个别节点出现问题 , 使得总线处于“死锁”状态 。
 文章插图
文章插图
6、通讯协议:
推荐阅读

![[数码小王]Pro有点像,还是双打孔曲面屏!荣耀30 Pro真机曝光,跟华为P40](https://imgcdn.toutiaoyule.com/20200328/20200328061128829913a_t.jpeg)
















- 最强做工配顶级散热!iGame RTX 3090 Vulcan OC评测
- 2年打磨古德白!iGame Vulcan内存上新:精选三星B-Die
- Canalys公布Q3国内手机出货量 小米逆势增长排名第四
- Canoo发布第二款全电动汽车:定位送货行业
- Canal探究
- 鸿蒙 OS 尖刀武器之分布式软总线技术全解析
- 前端大佬必备——Canvas
- 隐匿在语音识别背后的智能音箱之战
- BGLL社团划分|DBSCAN密度聚类|Python复杂网络
- 真旗舰?iGame Z490 VulcanX的科学开启指南