激光雷达、相机…万字长文带你入门无人驾驶车硬件( 六 )
4. 参数指标
相机主要有以下 5 个参数指标 。
像素:相机的像素越高 , 分辨率也越高 , 图像也就越清晰 。
焦距:焦距足够大 , 在拍摄比较远的物体时才足够清晰 。
视场角:视场角决定了摄像头能够看到的视野范围 , 广角的镜头所拍摄的视野范围更大 。
帧率:帧率越高 , 表示单位时间内拍摄的照片越多 , 拍摄速度越快 。
信噪比:信噪比越高表明产生的杂波信号越少 , 图像信号质量越好 , 单位为 DB 。
2.3.5 GPS/IMU
GPS(Global Positioning System)是全球卫星定位系统的简称 , 终端通过接收至少 4 颗卫星信号 , 就能迅速确定自己的经纬度和海拔高度 , 精度可以达到 10 米左右 , 是目前使用最广泛的定位手段 。 IMU(Inertial Measurement Unit)是惯性测量单元的简称 , IMU 安装有三轴的陀螺仪和三个方向的加速度计 , 用来测量物体三轴姿态角以及加速度 , 一般而言要安装在无人驾驶车的重心上 。 GPS 和 IMU 通常结合起来 , 用来获取无人驾驶车的位置和姿态 。
1. 应用
GPS 通常用于室外定位 , 在使用 RTK 技术之后 , 往往精度能够达到厘米级别 。 GPS 定位非常方便 , 但在高楼、隧道和停车场等场所会出现多径效应和信号衰减 , 导致测量精度下降 。 GPS 的更新频率也比较低 , 一般为 1s 刷新一次 。
为了解决上述问题 , IMU 通常用来辅助 GPS 进行定位 , IMU 不需要接收信号 , 不受信号质量影响 , 而且更新频率快 , 工作频率通常可达 100Hz 以上 , 可以弥补短期 GPS 刷新频率不足的问题 。 但是 IMU 有累计误差 , 在一段时间后需要校准 , 所以目前无人车主要通过 GPS 和 IMU 融合定位 。
2. 参数指标
陀螺仪:角度偏差为 0.1°/s - 0.001°/h 。
加速度计:加速度偏差为 100mg - 10μg 。
由距离计算公式可以得出 , 100mg 和 10μg 偏差的加速度计在 60s 之后的测量误差分别是 3528m 和 0.35m , 差距非常大 。
3. 小结
GPS 和 IMU 融合定位是目前无人驾驶中主要的定位手段 。 由于 GPS 的时间源比较精准 , 也用来当做整个无人驾驶车的基准时间 。
2.3.6 总结和展望
1. 总结
上面介绍了不同类型的传感器 , 表 2.1 所示为传感器的各项性能指标对比 。
 文章插图
文章插图
2. 展望
如表 2.1 所示 , 不同的传感器互有优缺点 , 单一的采用某种传感器并不能解决所有的问题 , 传感器融合才是未来无人驾驶车发展的方向 。
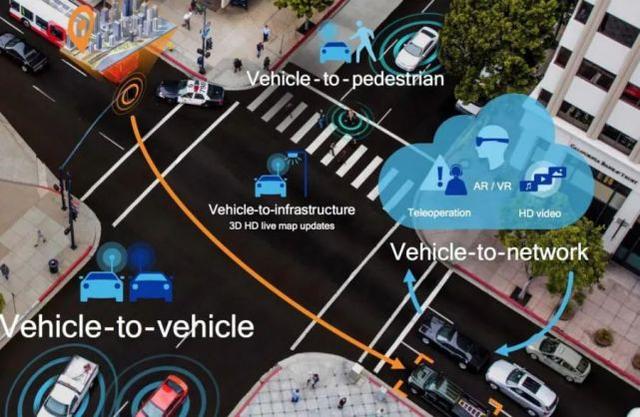
未来 , 另一个趋势是借助外界手段进行感知 , 也就是越来越被重视的车路协同 。 通过 V2X 技术实现车和外界环境的交互 , 从而实现超越传感器本身的感知能力 , 如图 2.11 所示 。
 文章插图
文章插图
图 2.11 V2X 示意图
2.4 计算单元
如果说传感器是无人驾驶车的眼睛 , 那么计算单元则是无人驾驶车的大脑 , 传感器采集到的数据经过计算单元的运算 , 最后才能转化为控制信号 , 控制汽车的行驶 。 因此一个性能强劲的大脑显得尤为关键 。
2.4.1 简介
无人驾驶车运行过程中需要处理各种不同类型的任务 , 所以目前大部分的无人驾驶计算平台都采用了异构平台的设计 。 无人驾驶车在 CPU 上运行操作系统和处理通用计算任务 , 在 GPU 上运行深度模型感知任务 。
无人驾驶操作系统运行在 CPU 上 , 实现系统调度、进程管理、网络通信等基本功能 。 还有一部分通用任务也跑在 CPU 上 , 例如定位的 NDT 算法、卡尔曼滤波和控制相关的算法等 。 无人驾驶的环境感知算法运行在 GPU 上 , 目前主流的深度学习框架都支持通过 GPU 来加速运算 , 特别是一些图像算法 。 GPU 的性能和无人驾驶车感知周围环境的能力息息相关 , 目前也有采用专门用于深度学习的芯片来处理此类任务 , 例如 google 的 TPU 等 。
推荐阅读















- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机