激光雷达、相机…万字长文带你入门无人驾驶车硬件( 三 )
 文章插图
文章插图
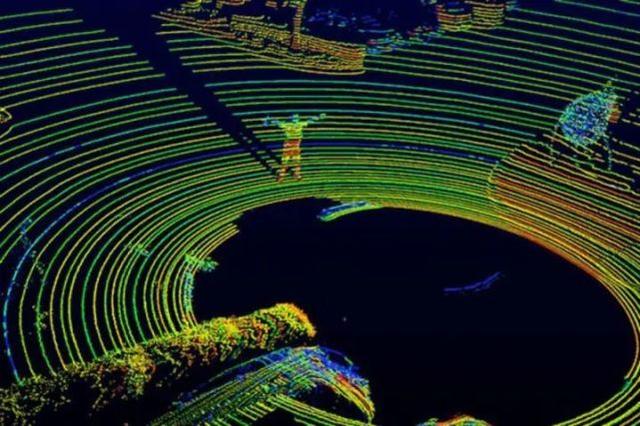
图 2.4 激光雷达扫描效果图
应用
激光雷达能够准确输出障碍物的大小和距离 , 同时还具有较高的分辨率 , 可以记录周围环境的三维信息 , 对无人驾驶进行规划轨迹 , 避开障碍物非常有用 。 除了上述优点外 , 激光雷达还是主动发射型设备 , 对光照的变化不敏感 , 在有光照变化和夜晚等场景基本不会受到影响 。 此外激光雷达能够提供水平 360 度的视野范围 , 保证整个无人驾驶车基本上没有视野盲区 。
但是激光雷达惧怕雾霾天气 , 因为雾霾颗粒的大小非常接近激光的波长 , 激光照射到雾霾颗粒上会产生干扰 , 导致效果下降 。 另外激光雷达还比较昂贵 , 以 64 线的激光雷达为例 , 售价约 8 万美元 , 可以抵得上一辆车的价格了 , 这也是推广激光雷达的障碍之一 。
除了障碍物感知 , 激光雷达还可以用来制作高精度地图 。 地图采集过程中 , 激光雷达每隔一小段时间输出一帧点云数据 , 这些点云数据包含环境的准确 3 维信息 , 通过把这些点云数据做拼接 , 就可以得到该区域的高精度地图 。
最后 , 激光雷达还可以用来做定位 , 无人车在行驶过程中利用当前激光雷达采集的点云数据帧和高精度地图做匹配 , 可以获取无人车的位置 。
2. 分类
激光雷达从工作方式上可以分为:旋转式激光雷达和固态激光雷达 。
旋转式激光雷达内部有一个马达 , 通过马达带动激光束 360° 旋转扫描 , 每扫描一圈得到一帧激光点云数据 , 扫描一圈的时间称为一个扫描周期 。
固态激光雷达采用相控门阵列技术 , 通过调整信号的相对相位来改变激光束的发射方向 , 实现扫描整个平面 , 固态雷达的扫描范围有限 , 一般水平视角为 60° 左右 。 虽然固态雷达的角度范围小 , 但是扫描精度和指向精度高、可控性好、成本也相对较低 , 是激光雷达未来的主要发展方向 。 图 2.5 所示分别是 Velodyne 公司生产的旋转式激光雷达和固态激光雷达 。
 文章插图
文章插图
图 2.5 旋转式激光雷达(左)和固态激光雷达(右)
3. 参数指标
(1)视场角 。 视场角决定了激光雷达能够看到的视野范围 , 分为水平视场角和垂直视场角 , 视场角越大 , 代表视野范围越大 , 反之则代表视野范围越小 。 以图 2.5 中的激光雷达为例 , 旋转式激光雷达的水平视场角为 360° , 垂直视场角为 26.9° , 固态激光雷达的水平视场角为 60° , 垂直视场角为 20° 。
(2)线数 。 线数越高 , 代表单位时间内采样的点就越多 , 分辨率也就越高 , 目前无人驾驶车一般采用 32 线或 64 线的激光雷达 。
(3)分辨率 。 分辨率和激光光束之间的夹角有关 , 夹角越小 , 分辨率越高 。 固态激光雷达的垂直分辨率和水平分辨率大概相当 , 约为 0.1° , 旋转式激光雷达的水平角分辨率为 0.08° , 垂直角分辨率约为 0.4° 。
(4)探测距离 。 激光雷达标称的最远探测距离一般为 150-200m , 实际上距离过远的时候 , 采样的点数会显著变少 , 测量距离和激光雷达的分辨率有着很大的关系 。 以激光雷达的垂直分辨率为 0.4° 最远探测距离为 200m 举例 , 在经过 200m 后激光光束 2 个点之间的距离为 , 也就是说只能检测到高于 1.4m 的障碍物 。 如图 2.6 所示 。
 文章插图
文章插图
图 2.6 激光雷达探测距离
如果要分辨具体的障碍物类型 , 那么需要采样点的数量更多 , 因此激光雷达有效的探测距离可能只有 60-70m 。 增加激光雷达的探测距离有 2 种方法 , 一是增加物体的反射率 , 二是增加激光的功率 。 物体的反射率是固定的 , 无法改变 , 那么就只能增加激光的功率了 。 但是增加激光的功率会损伤人眼 , 只能想办法增加激光的波长 , 以避开人眼可见光的范围 , 这样可以适当增大激光的功率 。 探测距离是制约激光雷达的另一个障碍 , 汽车在高速行驶的过程中越早发现障碍物 , 就越能预留越多的反应时间 , 从而避免交通事故 。
推荐阅读















- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机