激光雷达、相机…万字长文带你入门无人驾驶车硬件( 二 )
线控系统省去了机械传动的延迟 , 通过电脑可以更加快速地控制汽车 , 并且一些辅助驾驶任务也需要线控系统来完成 , 例如定速巡航、自动避障、车道保持等 。 线控系统最大的问题在于安全性 , 线控系统如果被破解 , 黑客甚至可以控制汽车的行驶 , 成为很大的安全隐患 。
线控系统从功能上可以分为以下 4 个部分 。
线控油门 , 通过电信号控制汽车油门大小 。
线控刹车 , 通过电信号控制汽车制动 。
线控转向 , 通过电信号控制汽车转向角度 。
线控档位 , 通过电信号控制汽车档位 。
线控系统一方面需要接收无人驾驶车发出的控制指令 , 另一方面要把指令执行的结果和车辆的状态反馈给无人驾驶车 。 无人驾驶车输出给线控系统的信息如下 。
油门、刹车、转向等的控制信号 。
档位信号 。
车灯、雨刷器等的控制信号 。
线控系统反馈给无人驾驶车的信息如下 。
命令执行的结果 。
底盘状态 。
底盘详细信息 。
除此之外 , 线控系统需要能够及时响应控制命令 。 响应时间是指从无人驾驶车发出控制命令到汽车执行完成的时间 , 如果响应时间太长或者响应时间不稳定 , 会影响无人驾驶车的控制 。
线控系统发送的数据帧不能丢失或者出现错误 , 如果数据帧丢失或者数据帧出错 , 可能会造成控制失效 , 这也是不能接受的 。
在控制命令出错的情况下 , 线控系统要提供一系列错误码来通知控制系统 , 以便控制系统根据错误码获取出错的原因 。
控制命令越界处理 , 当控制信号越界的时候线控系统应当拒绝执行 , 并且进入人工接管模式 。
当安全员主动控制方向盘、油门或者刹车脚踏板的时候 , 线控系统能够主动退出无人驾驶模式 。
下面是百度 Apollo 线控认证平台的部分性能指标 。
最大驱动加速度 。 最大驱动加速度指的是车可以达到的最大加速度值 。
驱动响应延迟时间 。 驱动响应延迟时间是发送命令到开始执行的时间 。
最大超调 。 最大超调是指油门调节的过程中 , 目标值与实际值之间的最大误差 。
对应执行时间 。 对应执行时间是驱动开始响应到响应到目标加速度的值 。
2.3 传感器
为了方便感知周围的环境 , 无人驾驶车用到了各种各样的传感器 , 这些传感器从功能上划分为 2 类:环境感知和状态感知 。
环境感知主要是获取车当前所处的环境信息 , 包括:周围的车辆、行人、交通标志、红绿灯、所处的场景(路口交汇处、停车场、高速公路)等 。
状态感知主要是获取车自身的状态 , 包括当前车辆的位置、航向角、速度、俯仰角等信息 。
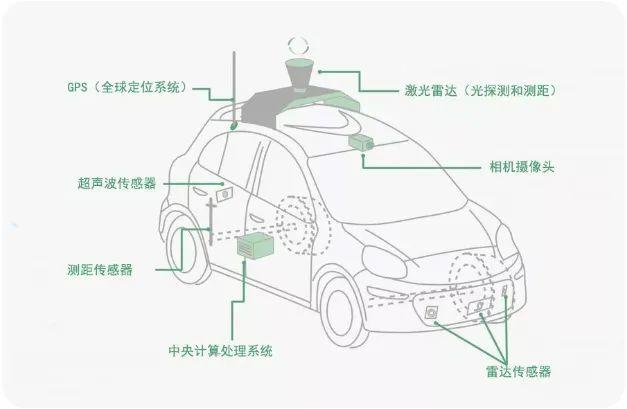
无人驾驶车所用到的传感器如图 2.3 所示 , 包括激光雷达、毫米波雷达、超声波雷达、相机、GPS、IMU 等 。 下面开始分别介绍这几种传感器 。
 文章插图
文章插图
图 2.3 无人驾驶车传感器示意
2.3.1 激光雷达
激光雷达是无人驾驶车中最重要的传感器之一 , 目前大部分的无人驾驶公司都选择配备激光雷达 。 虽然特斯拉的 CEO 伊隆 · 马斯克曾经一语惊人的说“只有傻瓜才用激光雷达 。 ” , 但出于安全性的考虑 , 激光雷达仍然是无人驾驶车的首选 。
1. 原理
激光雷达( Light Detection and Ranging , LIDAR)是光检测和测距的缩写 , 通过对外发射激光脉冲来进行物体检测和测距 。 激光雷达采用飞行时间(Time of Flight , TOF)测距 , 包括激光器和接收器 。 激光器先发送一束激光 , 遇到障碍物后反射回来 , 由接收器接收 , 最后激光雷达通过计算激光发送和接收的时间差 , 得到目标和自己的相对距离 。
如果采用多束激光并且 360 度旋转扫描 , 就可以得到整个环境的三维信息 。 激光雷达扫描出来的是一系列的点 , 因此激光雷达扫描出来的结果也叫“激光点云” , 如图 2.4 所示 。
推荐阅读















- 小米有品众筹激光鼻炎治疗仪:不吃药 不开刀
- 新荣耀新旗舰V40海报露出 屏幕和相机是最大特色
- OPPO Reno4 Pro 5G的DXO相机评分出炉!拿到108分
- 曝iPhone 13全系标配激光雷达扫描仪 真就十三香?
- Galaxy S21系列相机规格曝光:Ultra配1.08亿像素主摄
- 谷歌相机最新版移植来了!新增电影运镜
- 设计总监谈小米11外形:后摄方案百里挑一、多花2000万定制相机模组
- 小米10i手机参数曝光!专供印度市场后置相机大升级
- 一加Nord智能机DxOMark相机得分108:表现中等 性价比尚可
- 佳能新专利曝光 或将推出云台相机