жҸӯз§ҳеҚҺдёәжҝҖе…үйӣ·иҫҫ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
жқҘжәҗпјҡеҶ…е®№иҪ¬иҪҪиҮӘе…¬дј—еҸ·гҖҢдҪҗжҖқжұҪиҪҰз ”з©¶гҖҚ пјҢ и°ўи°ў гҖӮ
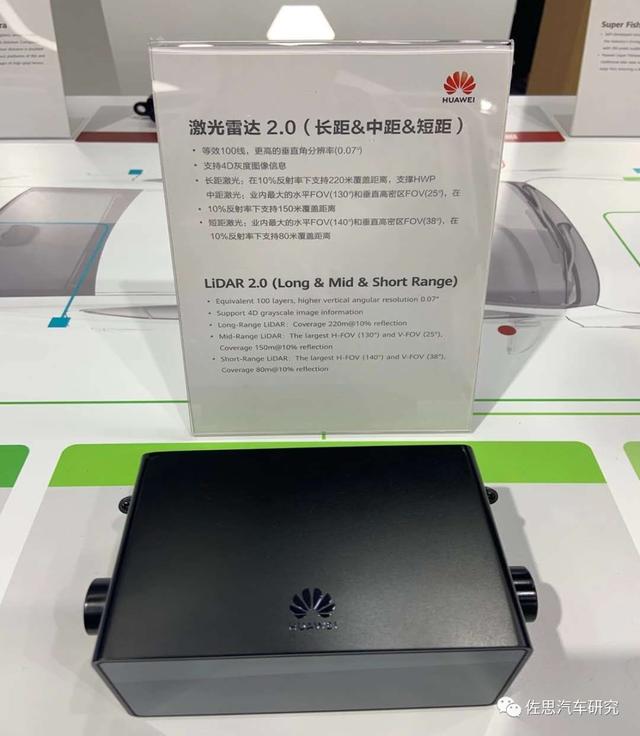
еҚҺдёәжңҖиҝ‘еұ•еҮәдәҶй’ҲеҜ№иҮӘеҠЁй©ҫ驶зҡ„дёҖзі»еҲ—дј ж„ҹеҷЁ пјҢ еҢ…жӢ¬еҸҢзӣ®ж‘„еғҸеӨҙгҖҒжҜ«зұіжіўйӣ·иҫҫе’ҢжҝҖе…үйӣ·иҫҫ гҖӮ иҝҷж¬ЎжҲ‘们йҰ–е…Ҳи§ЈеҜҶеҚҺдёәзҡ„жҝҖе…үйӣ·иҫҫ пјҢ дёӢж¬ЎжҳҜеҸҢзӣ®ж‘„еғҸеӨҙ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
еҚҺдёәзҡ„дҝқеҜҶе·ҘдҪңдёҖеҗ‘жҳҜдёҡеҶ…жңҖеҘҪзҡ„ пјҢ еӣ жӯӨеҲ«жҢҮжңӣжңүеӨӘеӨҡе…¬ејҖиө„ж–ҷ пјҢ еӣ жӯӨзӘҒз ҙеҸЈиҝҳжҳҜйҖүеңЁдё“еҲ©дёҠ гҖӮ 2020е№ҙ7жңҲ2ж—Ҙ пјҢ дё–з•ҢзҹҘиҜҶдә§жқғз»„з»ҮеӣҪйҷ…еұҖе…¬еёғдәҶеҚҺдёәзҡ„дёҖйЎ№жңүе…іжҝҖе…үйӣ·иҫҫзҡ„дё“еҲ© пјҢ еҸ‘жҳҺеҗҚз§°дёәдёҖз§ҚжҝҖе…үйӣ·иҫҫжөӢйҮҸжЁЎз»„е’ҢжҝҖе…үйӣ·иҫҫ гҖӮ иҝҷжҳҜеҚҺдёәжҝҖе…үйӣ·иҫҫйўҶеҹҹиҰҶзӣ–йқўжңҖе№ҝзҡ„дё“еҲ© пјҢ й•ҝиҫҫ52йЎө пјҢ еӨ§еӨҡж•°дёӯж–ҮеҸ‘жҳҺдё“еҲ©дёҚи¶…иҝҮ20йЎө гҖӮ еҚҺдёәдё“еҲ©з”іиҜ·иҜҰз»ҶиҜҙжҳҺдәҶжҝҖе…үйӣ·иҫҫзҡ„еҺҹзҗҶе’Ңжһ„йҖ гҖӮ еҫҲжңүеҸҜиғҪе°ұжҳҜеҚҺдёәиҝҷж¬ҫжҝҖе…үйӣ·иҫҫ2.0зҡ„иҜҰз»Ҷд»Ӣз»Қ гҖӮ
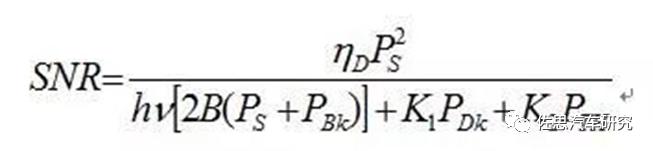
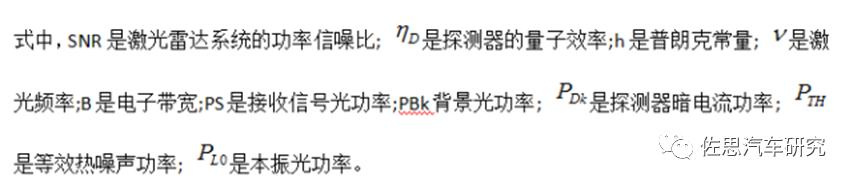
еңЁи§ЈеҜҶеҚҺдёәжҝҖе…үйӣ·иҫҫеүҚе…ҲдәҶи§ЈдёҖдёӢжҝҖе…үйӣ·иҫҫдҝЎеҷӘжҜ”зҡ„жҰӮеҝө пјҢ д»»дҪ•дј ж„ҹеҷЁ пјҢ жңҖйҮҚиҰҒзҡ„еҸӮж•°е°ұжҳҜдҝЎеҷӘжҜ” пјҢ йқһзӣёе№ІжҝҖе…үйӣ·иҫҫзҡ„дҝЎеҷӘжҜ”SNRж–№зЁӢеҸҜд»ҘиЎЁзӨәдёәпјҡ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
д»ҺдёҠйқўе…¬ејҸеҸҜд»ҘзңӢеҮә пјҢ иҰҒжҸҗй«ҳдҝЎеҷӘжҜ” пјҢ жңҖз®ҖеҚ•жңүж•Ҳзҡ„ж–№жі•жҳҜжҸҗй«ҳжҺҘ收дҝЎеҸ·е…үеҠҹзҺҮе’ҢйҮҸеӯҗж•ҲзҺҮ гҖӮ жҝҖе…үйӣ·иҫҫжҢүе…үеӯҰжү«жҸҸеҷЁзӣ®еүҚеҸҜд»ҘеҲҶдёәдёүеӨ§зұ» пјҢ дёҖзұ»жҳҜж—ӢиҪ¬еһӢжңәжў°жҝҖе…үйӣ·иҫҫ пјҢ еҢ…жӢ¬360еәҰж—ӢиҪ¬е’ҢеҸҚе°„й•ңеҫҖеӨҚзҡ„Scala пјҢ жҳҜзӣ®еүҚжңҖеёёи§ҒжңҖжҲҗзҶҹзҡ„жҝҖе…үйӣ·иҫҫ гҖӮ 第дәҢзұ»жҳҜMEMSжҝҖе…үйӣ·иҫҫ гҖӮ 第дёүзұ»жҳҜFlashжҝҖе…үйӣ·иҫҫ пјҢ FlashжҝҖе…үйӣ·иҫҫе®һйҷ…жҳҜ2D/3Dз„Ұе№ійқўпјҲFPAпјүж‘„еғҸжңә пјҢ д№ҹе°ұжҳҜжүӢжңәе’Ңе№іжқҝйўҶеҹҹеӨ§йҮҸдҪҝз”Ёзҡ„ToFзӣёжңә пјҢ дёӨиҖ…е®Ңе…ЁдёҖж · пјҢ еҸӘжҳҜжңүж•Ҳи·қзҰ»е·®еҫҲеӨҡ гҖӮ FlashжҝҖе…үйӣ·иҫҫе…ЁеҚҠеҜјдҪ“жһ„жҲҗ пјҢ дёҺзӣ®еүҚдј з»ҹж‘„еғҸеӨҙеҮ д№ҺжІЎжңүе·®еҲ« пјҢ еӣ жӯӨеүҚйҖ”иҝңеӨ§ пјҢ дҪҶиҝ‘жңҹеҶ…иҗҪең°иҫғйҡҫ пјҢ еӣ дёәзӣ®еүҚVCSELзҡ„ж•ҲзҺҮе’ҢжҢҮеҗ‘жҖ§ пјҢ и®©FlashжҝҖе…үйӣ·иҫҫжңүж•Ҳи·қзҰ»е’ҢеҲҶиҫЁзҺҮйғҪдёҚеҸҠеүҚдёӨзұ» пјҢ йЎәдҫҝиҰҒиҜҙдёҖдёӢ пјҢ еүҚдёӨзұ»жҝҖе…үйӣ·иҫҫиҫ“еҮәзҡ„жҳҜзӮ№дә‘ пјҢ FlashжҝҖе…үйӣ·иҫҫиҫ“еҮәзҡ„жҳҜ3DеӣҫеғҸ пјҢ еҪ“然д№ҹеҸҜд»Ҙиҫ“еҮәзӮ№дә‘ гҖӮ зӣ®еүҚй«ҳжҖ§иғҪFlashжҝҖе…үйӣ·иҫҫдё»иҰҒжҳҜIBEOе’ҢOUSTER гҖӮ йғҪеҜ№BeamеҒҡдәҶи°ғж•ҙ пјҢ дёҚжҳҜеҚ•дёҖBeamиҖҢжҳҜMulti-Beam гҖӮ
MEMSжҳҜзӣ®еүҚжңҖеҝ«иҗҪең°зҡ„ж–№жЎҲ пјҢ е’Ңжңәжў°жҝҖе…үйӣ·иҫҫзӣёжҜ” пјҢ е…¶дјҳеҠҝжңүдёү пјҢ йҰ–е…ҲMEMSеҫ®жҢҜй•ңеё®еҠ©жҝҖе…үйӣ·иҫҫж‘Ҷи„ұдәҶз¬ЁйҮҚзҡ„马иҫҫгҖҒеӨҡжЈұй•ңзӯүжңәжў°иҝҗеҠЁиЈ…зҪ® пјҢ жҜ«зұізә§е°әеҜёзҡ„еҫ®жҢҜй•ңеӨ§еӨ§еҮҸе°‘дәҶжҝҖе…үйӣ·иҫҫзҡ„е°әеҜё пјҢ жҸҗй«ҳдәҶеҸҜйқ жҖ§ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
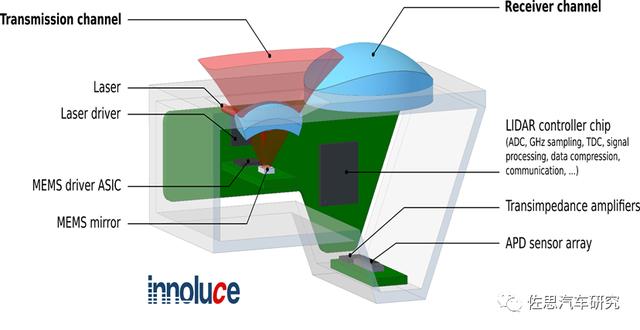
иӢұйЈһеҮҢ收иҙӯзҡ„Innoluce MEMSжҝҖе…үйӣ·иҫҫзӨәж„Ҹеӣҫ
е…¶ж¬ЎжҳҜжҲҗжң¬ пјҢ MEMSеҫ®жҢҜй•ңзҡ„еј•е…ҘеҸҜд»ҘеҮҸе°‘жҝҖе…үеҷЁе’ҢжҺўжөӢеҷЁж•°йҮҸ пјҢ жһҒеӨ§ең°йҷҚдҪҺжҲҗжң¬ гҖӮ дј з»ҹзҡ„жңәжў°ејҸжҝҖе…үйӣ·иҫҫиҰҒе®һзҺ°еӨҡе°‘зәҝжқҹ пјҢ е°ұйңҖиҰҒеӨҡе°‘з»„еҸ‘е°„жЁЎеқ—дёҺжҺҘ收模еқ— гҖӮ иҖҢйҮҮз”ЁдәҢз»ҙMEMSеҫ®жҢҜй•ң пјҢ д»…йңҖиҰҒдёҖжқҹжҝҖе…үе…үжәҗ пјҢ йҖҡиҝҮдёҖйқўMEMSеҫ®жҢҜй•ңжқҘеҸҚе°„жҝҖе…үеҷЁзҡ„е…үжқҹ пјҢ дёӨиҖ…йҮҮз”Ёеҫ®з§’зә§зҡ„йў‘зҺҮеҚҸеҗҢе·ҘдҪң пјҢ йҖҡиҝҮжҺўжөӢеҷЁжҺҘ收еҗҺиҫҫеҲ°еҜ№зӣ®ж Үзү©дҪ“иҝӣиЎҢ3Dжү«жҸҸзҡ„зӣ®зҡ„ гҖӮ дёҺеӨҡз»„еҸ‘е°„/жҺҘ收иҠҜзүҮз»„зҡ„жңәжў°ејҸжҝҖе…үйӣ·иҫҫз»“жһ„зӣёжҜ” пјҢ MEMSжҝҖе…үйӣ·иҫҫеҜ№жҝҖе…үеҷЁе’ҢжҺўжөӢеҷЁзҡ„ж•°йҮҸйңҖжұӮжҳҺжҳҫеҮҸе°‘ гҖӮ д»ҺжҲҗжң¬и§’еәҰеҲҶжһҗ пјҢ Nзәҝжңәжў°ејҸжҝҖе…үйӣ·иҫҫйңҖиҰҒNз»„ICиҠҜзүҮз»„пјҡи·Ёйҳ»ж”ҫеӨ§еҷЁпјҲTIAпјүгҖҒдҪҺеҷӘеЈ°ж”ҫеӨ§еҷЁпјҲLNAпјүгҖҒжҜ”иҫғеҷЁпјҲComparatorпјүгҖҒжЁЎж•°иҪ¬жҚўеҷЁпјҲADCпјүзӯү гҖӮ еҰӮжһңйҮҮз”ЁиҝӣеҸЈзҡ„жҝҖе…үеҷЁпјҲе…ёеһӢзҡ„еҰӮExcelitasзҡ„LDпјүе’ҢжҺўжөӢеҷЁпјҲе…ёеһӢзҡ„еҰӮж»Ёжқҫзҡ„PDпјү пјҢ 1Kж•°йҮҸдёӢжҜҸзәҝжҝҖе…үйӣ·иҫҫзҡ„жҲҗжң¬еӨ§зәҰ200зҫҺе…ғ пјҢ еӣҪдә§еҰӮеёёз”Ёзҡ„й•ҝжҳҘе…үжңәжүҖжҝҖе…үеҷЁд»·ж јиғҪдҪҺдёҖдәӣ гҖӮ MEMSзҗҶи®әдёҠеҸҜд»ҘеҒҡеҲ°е…¶1/16зҡ„жҲҗжң¬ гҖӮ
жңҖеҗҺжҳҜеҲҶиҫЁзҺҮ пјҢ MEMSжҢҜй•ңеҸҜд»ҘзІҫзЎ®жҺ§еҲ¶еҒҸиҪ¬и§’еәҰ пјҢ иҖҢдёҚеғҸжңәжў°жҝҖе…үйӣ·иҫҫйӮЈж ·еҸӘиғҪи°ғж•ҙ马иҫҫиҪ¬йҖҹ гҖӮ еғҸVelodyneзҡ„VelarrayжҜҸз§’еҚ•ж¬ЎеӣһжіўзӮ№иҫҫ200дёҮдёӘ пјҢ иҖҢVelodyneзҡ„128зәҝжҝҖе…үйӣ·иҫҫд№ҹдёҚиҝҮ240дёҮдёӘ пјҢ VelarrayеҮ д№ҺзӣёеҪ“дәҺ106зәҝжңәжў°жҝҖе…үйӣ·иҫҫ гҖӮ
жҺЁиҚҗйҳ…иҜ»













- еҚҺдёәйёҝи’ҷжқҘиўӯпјҢеҲҳејәдёңгҖҒи‘ЈжҳҺзҸ гҖҒ马еҢ–и…ҫеҠӣжҢәпјҢеҚҙдёҚи§ҒйҳҝйҮҢзі»иә«еҪұ
- йёҝи’ҷиҺ·ж¬§дјҒеҠӣжҢәпјҒеҚҺдёәзҡ„еӨ§ж—¶д»Је°ҶеҲ°жқҘпјҢи°·жӯҢиә«дёҠйҮҚзҺ°иҜәеҹәдәҡзҡ„еҪұеӯҗ
- ж”№еҸҳзҪ‘з»ңеҢ–еҠһе…¬ жҸӯз§ҳеӨҸжҷ®ж–°еӨҚеҗҲжңәзі»еҲ—
- зҰ»ејҖеҚҺдёәзҡ„ж–°иҚЈиҖҖжһҜжңЁйҡҫж”ҜпјҹйҰ–ж¬ҫжүӢжңәе°ұиў«еҶ·иҗҪпјҢдә¬дёңйў„зәҰж•°еӨӘйҡҫзңӢ
- OPPO Reno4 Pro DxOMarkжҲҗз»©е…¬еёғпјҡ109еҲҶдҪҺдәҺеҚҺдёәP20 Pro
- иҪ¬иҪ¬Q4жүӢжңәиЎҢжғ…пјҡеҚҺдёәMate40 ProжӣҙдҝқеҖј
- е°Ҹзұіжңүе“Ғдј—зӯ№жҝҖе…үйј»зӮҺжІ»з–—д»ӘпјҡдёҚеҗғиҚҜ дёҚејҖеҲҖ
- еҗ‘зҫҺеӣҪйқ жӢўпјҹз‘һе…ёз»•ејҖеҚҺдёәйғЁзҪІ5GпјҒеҚҺдёәе·І2ж¬Ўиө·иҜү
- еҚҺдёәејҖе§ӢиҝӣеҶӣжө·еӨ–ж”Ҝд»ҳпјҹе…Ҳз»ҷ他们зӮ№з”ңеӨҙпјҢж–°еҠ еқЎжҲҗйҹӯиҸңеҹәең°пјҹ
- еҚҺдёәеӣ зҘёеҫ—зҰҸпјҹжү“иҙҘй«ҳйҖҡйӘҒйҫҷ888зҡ„пјҢе…¶е®һ并дёҚжҳҜйә’йәҹ9000