иҜҜе·®|еҚғзұіж„ҹзҹҘиҜҜе·®дҪҺдәҺ5%пјҢе¬ҙеҪ»еҸ‘еёғе…ЁзҗғйўҶе…Ҳзҡ„и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜ
_еҺҹйўҳдёә еҚғзұіж„ҹзҹҘиҜҜе·®дҪҺдәҺ5% пјҢ е¬ҙеҪ»еҸ‘еёғе…ЁзҗғйўҶе…Ҳзҡ„и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜ
йұјзҫҠ еҸ‘иҮӘ еҮ№йқһеҜә
йҮҸеӯҗдҪҚ жҠҘйҒ“ | е…¬дј—еҸ· QbitAI
иЎҢ驶еңЁй«ҳйҖҹе…¬и·ҜдёҠзҡ„иҮӘеҠЁй©ҫ驶йҮҚеҚЎ пјҢ ж—¶йҖҹдҝқжҢҒеңЁ 80-100 km/h пјҢ еҚіжҜҸ秒移еҠЁеӨ§зәҰ 25 зұі гҖӮ
еҲ№иҪҰи·қзҰ» пјҢ е°ұдјҡжҳҜд№ҳз”ЁиҪҰзҡ„ 2 еҖҚ гҖӮ

ж–Үз« еӣҫзүҮ
иҝҷж ·зҡ„жғ…еҶөдёӢ пјҢ иҰҒдҝқиҜҒиЎҢиҪҰе®үе…Ё пјҢ ж„ҹзҹҘи·қзҰ»иө·з ҒиҰҒиҫҫеҲ° 300 зұід»ҘдёҠ гҖӮ
иҪҰиҫҶвҖңзңӢвҖқеҫ—и¶ҠиҝңгҖҒжөӢеҫ—и¶ҠеҮҶ пјҢ е°ұи¶ҠиғҪзІҫзЎ®ең°еҲӨж–ӯеүҚиҪҰеҠЁеҗ‘ пјҢ еҒҡеҮәеҗҲзҗҶзҡ„йў„еҲӨ пјҢ дҝқйҡңиЎҢиҪҰе®үе…Ё гҖӮ
иҝҷе°ұжҳҜе¬ҙеҪ»з§‘жҠҖжңҖж–°еҸ‘еёғзҡ„и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜиҰҒи§ЈеҶізҡ„й—®йўҳ гҖӮ
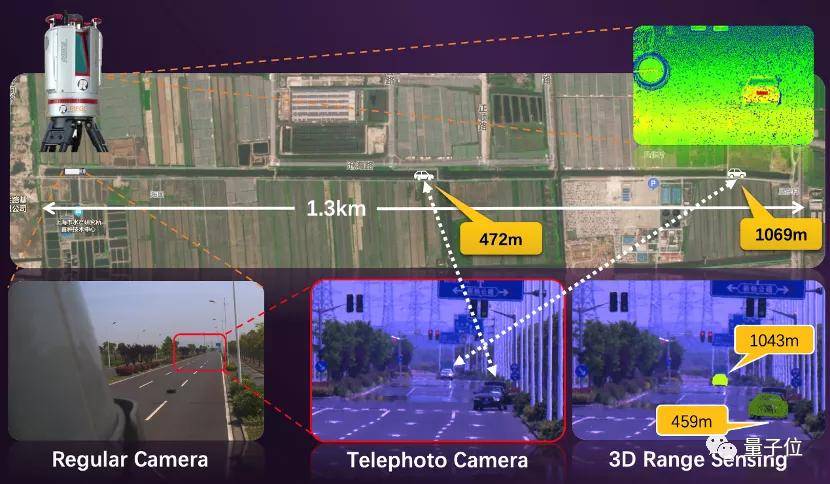
дёҚд»…ж„ҹзҹҘи·қзҰ»еҸҜд»ҘиҫҫеҲ° 1000 зұі пјҢ е¬ҙеҪ»иҝҳеңЁиЎҢдёҡеҶ…йҰ–ж¬ЎжҸҗеҲ°дәҶжөӢи·қзІҫеәҰвҖ”вҖ”
гҖҗиҜҜе·®|еҚғзұіж„ҹзҹҘиҜҜе·®дҪҺдәҺ5%пјҢе¬ҙеҪ»еҸ‘еёғе…ЁзҗғйўҶе…Ҳзҡ„и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜгҖ‘1000зұіж„ҹзҹҘи·қзҰ»дёӢ пјҢ жөӢи·қиҜҜе·®иғҪиҫҫеҲ°5%д»ҘдёӢ гҖӮ
е…јйЎҫи¶…й•ҝи·қе’ҢзІҫеҮҶзҡ„иҜҶеҲ«ж•Ҳжһң пјҢ 并且дёҚйңҖиҰҒйўқеӨ–зҡ„дј ж„ҹеҷЁ пјҢ е¬ҙеҪ»зҡ„жҠҖжңҜеӣўйҳҹжҳҜеҰӮдҪ•еҒҡеҲ°пјҹ
е…¶дёӯиҜҖзӘҚ пјҢ е¬ҙеҪ»CTOжқЁзқҝеҲҡеҚҡеЈ«еҗҢйҮҸеӯҗдҪҚиҝӣиЎҢдәҶеҲҶдә« гҖӮ
и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜ
ж— и®әжҳҜжҝҖе…үйӣ·иҫҫиҝҳжҳҜжҜ«зұіжіўйӣ·иҫҫ пјҢ жңүж•Ҳж„ҹзҹҘи·қзҰ»д№ҹдёҚиҝҮ 150-200 зұі гҖӮ
еңЁй•ҝи·қзҰ»зҡ„ж„ҹзҹҘдёҠ пјҢ дё»иҰҒйңҖиҰҒдҫқйқ зӣёжңәдҪңдёәдј ж„ҹеҷЁ гҖӮ
жқЁзқҝеҲҡеҚҡеЈ«д»Ӣз»Қ пјҢ зӣ®еүҚдё»иҰҒзҡ„жҠҖжңҜжңүдёӨз§Қпјҡ
е…¶дёҖ пјҢ еҸҢзӣ®з«ӢдҪ“и§Ҷи§үжөӢи·қ гҖӮ еҚійҖҡиҝҮдёӨдёӘж‘„еғҸеӨҙжқҘи§ӮжөӢеҗҢдёҖзү©дҪ“ пјҢ йҖҡиҝҮдёүи§’еҢ–жқҘеҫ—еҲ°дёүз»ҙи·қзҰ» гҖӮ
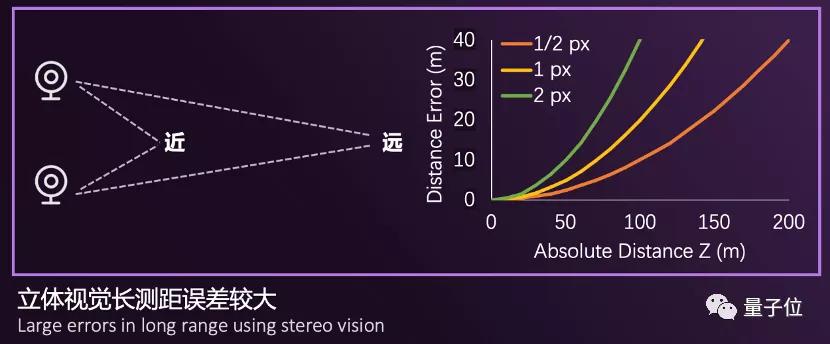
ж–Үз« еӣҫзүҮ
иҝҷдёҖж–№жЎҲзҡ„зјәзӮ№еңЁдәҺ пјҢ еҜ№дәҺи¶…й•ҝи·қиҖҢиЁҖ пјҢ еҸҢзӣ®жөӢи·қзҡ„иҜҜе·®йҡҸи·қзҰ»зҡ„е№іж–№еўһй•ҝ гҖӮ дёҫдёӘдҫӢеӯҗ пјҢ еҰӮжһңеңЁ 100 зұіж—¶ пјҢ жөӢи·қиҜҜе·®жҳҜ 1 зұі пјҢ йӮЈд№ҲеҪ“и·қзҰ»иҫҫеҲ° 1000 зұі пјҢ иҜҜе·®е°ұдјҡиҫҫеҲ° 100 зұі гҖӮ
е…¶дәҢ пјҢ зӣҙжҺҘйҖҡиҝҮеӣһеҪ’жҲ–иҖ…дёҖдәӣз®ҖеҚ•еҮ дҪ•зҡ„ж–№жі•жқҘи®Ўз®—еүҚж–№зү©дҪ“зҡ„ж·ұеәҰдҝЎжҒҜ гҖӮ
иҝҷз§Қж–№жі•дә§з”ҹзҡ„иҜҜе·®еңЁ15%-20%е·ҰеҸі гҖӮ дёҚд»…еҰӮжӯӨ пјҢ еңЁи¶…й•ҝи·қдёҠ пјҢ ж ҮжіЁж•°жҚ®дёҚи¶і пјҢ еҫҲйҡҫеҜ№з§»еҠЁзү©дҪ“зҡ„з»ҶиҠӮиҝӣиЎҢеӨ„зҗҶ гҖӮ
й’ҲеҜ№иҝҷдәӣй—®йўҳ пјҢ е¬ҙеҪ»зҡ„и§ЈеҶіж–№жЎҲвҖ”вҖ”жҠҠеүҚжҷҜе’ҢиғҢжҷҜеҲҶејҖжқҘеҒҡеӨ„зҗҶ гҖӮ
иғҢжҷҜ пјҢ жҳҜжҢҮеүҚж–№зҡ„ж•ҙдёӘйқҷжҖҒзҺҜеўғ гҖӮ е¬ҙеҪ»зҡ„и¶…й•ҝи·қзІҫеҮҶ3Dж„ҹзҹҘжҠҖжңҜ пјҢ з»“еҗҲжҝҖе…үйӣ·иҫҫ пјҢ жҠҠжҝҖе…үзӮ№дә‘дҪңдёәжҺ§еҲ¶зӮ№ пјҢ 然еҗҺз”ұиҝ‘еҸҠиҝң пјҢ йҖҡиҝҮеӣҫеғҸзҡ„ж–№жі•и®Ўз®—ж·ұеәҰ гҖӮ
жқЁзқҝеҲҡеҚҡеЈ«и§ЈйҮҠиҜҙпјҡ
дҪ еҸҜд»ҘжғіиұЎеңЁдёҖеј еӣҫеғҸдёҠ пјҢ жңүдәӣзӮ№еёҰжңүж·ұеәҰдҝЎжҒҜ пјҢ дҪҶжӣҙеӨҡзҡ„зӮ№жІЎжңү гҖӮ
йҖҡиҝҮж— зӣ‘зқЈж·ұеәҰеӯҰд№ пјҢ жҲ‘们жҠҠиҝҷдәӣеёҰжңүж·ұеәҰдҝЎжҒҜзҡ„зӮ№ пјҢ д»Һиҝ‘еҲ°иҝңең°жү©еұ•еҮәеҺ» пјҢ е°ұеҸҜд»Ҙеҫ—еҲ°еҫҲеҘҪзҡ„й•ҝи·қзҰ»иғҢжҷҜж·ұеәҰеӣҫеғҸ гҖӮ
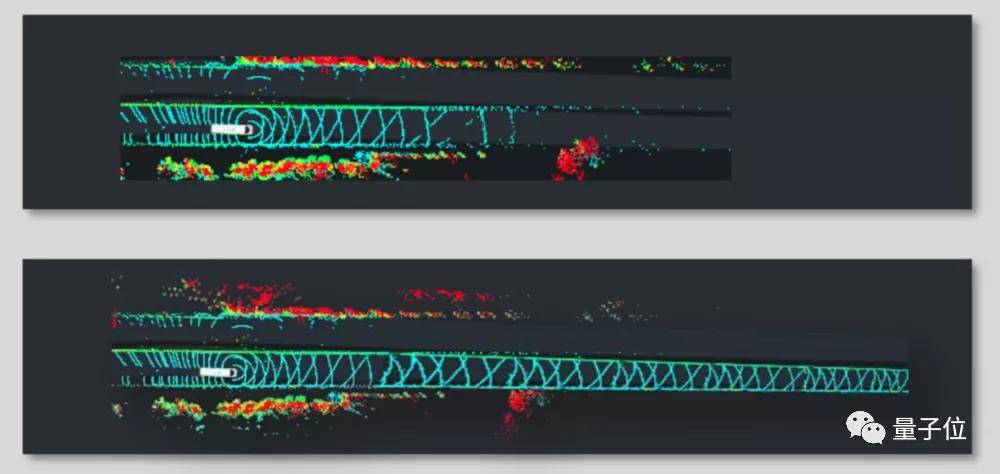
ж–Үз« еӣҫзүҮ
иҖҢеүҚжҷҜ пјҢ е°ұжҳҜеүҚж–№иЎҢ驶зҡ„иҪҰиҫҶ гҖӮ
еҜ№дәҺиҪҰиҫҶ пјҢ е¬ҙеҪ»йҮҮз”ЁдәҶз»Ҹе…ёеҮ дҪ•ж–№жі•жқҘиҝӣиЎҢеӨ„зҗҶ гҖӮ
е…·дҪ“иҖҢиЁҖ пјҢ жҳҜеҜ№иҪҰиҫҶзӣҙжҺҘиҝӣиЎҢжЈҖжөӢ пјҢ йҖҡиҝҮе°ҶиҪҰиҫҶиҝӣиЎҢйғЁд»¶зә§жӢҶи§Ј пјҢ е°Ҷе…¶дёҺдёүз»ҙжЁЎеһӢеҒҡзІҫеҮҶжӢҹеҗҲ гҖӮ йҖҡиҝҮжӢҹеҗҲеҮәжқҘзҡ„дёүз»ҙжЁЎеһӢ пјҢз»“еҗҲиғҢжҷҜзҡ„ж·ұеәҰеӣҫзүҮ пјҢ е°ұеҸҜд»Ҙеҫ—еҲ°иҪҰиҫҶзҡ„дҪҚе§ҝдҝЎжҒҜ пјҢ еҢ…жӢ¬и·қзҰ» пјҢ жңқеҗ‘зӯү пјҢ е®һзҺ°дәҶи¶…й•ҝи·қзҰ»зҡ„дёүз»ҙж„ҹзҹҘ гҖӮ
иҝҷдёҖеҘ—ж–№жЎҲ пјҢ иў«з§°дёәвҖңеңәжҷҜж·ұеәҰж„ҹзҹҘ + еүҚжҷҜиҪҰиҫҶйғЁд»¶зә§и§ЈжһҗвҖқ гҖӮ з”ЁжӣҙйҖҡдҝ—зҡ„иҜқиҜҙ пјҢ е°ұжҳҜж·ұеәҰеӯҰд№ ж–№жі•е’ҢеҹәдәҺеҮ дҪ•зҡ„з»Ҹе…ёи®Ўз®—жңәи§Ҷи§үж–№жі•зҡ„жңүжңәз»“еҗҲ гҖӮ
иҝҷж ·дёҖжқҘ пјҢ ж— и®әжҳҜеҜ№иҝ‘жҷҜиҝҳжҳҜиҝңжҷҜ пјҢ зі»з»ҹеҜ№дәҺж•ҙдёӘзҺҜеўғйғҪиғҪжңүеҫҲеҘҪзҡ„ж„ҹзҹҘ гҖӮ
еҸҰеӨ– пјҢ еңЁзӣёеҜ№жҒ¶еҠЈзҡ„еӨ©ж°”жқЎд»¶дёӢ пјҢ жҜ”еҰӮйӣЁеӨ©гҖҒйӣҫеӨ© пјҢ жҝҖе…үйӣ·иҫҫгҖҒж‘„еғҸеӨҙиҝҷдәӣеҹәдәҺе…үеӯҰдҝЎеҸ·зҡ„дј ж„ҹеҷЁ пјҢ йғҪдјҡеҸ—еҲ°еҪұе“Қ гҖӮ
дёәжӯӨ пјҢ е¬ҙеҪ»д№ҹеҹәдәҺи®Ўз®—ж‘„еҪұеӯҰпјҲcomputational photographyпјүжҠҖжңҜ пјҢ ејҖеҸ‘дәҶеә”еҜ№зҡ„еҺ»йӣЁеҺ»йӣҫз®—жі• пјҢ дҝқйҡңж„ҹзҹҘи·қзҰ»е’Ңж„ҹзҹҘзІҫеәҰ гҖӮ
ж–Үз« еӣҫзүҮ
еҰӮдёҠеӣҫжүҖзӨә пјҢ е¬ҙеҪ»з”ЁйқҷжҖҒдёүз»ҙжү«жҸҸзҡ„ж–№жі•еҜ№е…¶з®—жі•иҝӣиЎҢдәҶдёҘж јзҡ„е®һең°йӘҢиҜҒ пјҢ е®һйӘҢиҜҒжҳҺ пјҢ е¬ҙеҪ»зҡ„и¶…й•ҝи·қ3Dж„ҹзҹҘжҠҖжңҜеңЁи·қзҰ»дёә 1000 зұізҡ„ж—¶еҖҷ пјҢ жөӢи·қзІҫеәҰиғҪиҫҫеҲ° 5%д»ҘеҶ… гҖӮ
еңЁж·ұеәҰдёүз»ҙжөӢи·қзҡ„зІҫзЎ®еәҰдёҠ пјҢ иҜҘжҠҖжңҜе·Із»ҸиҫҫеҲ°дәҶдё–з•ҢйўҶе…Ҳж°ҙе№і гҖӮ
жңүдҪ•д»·еҖјпјҹ
жқЁзқҝеҲҡеҚҡеЈ«д»Ӣз»Қ пјҢ ж„ҹзҹҘи·қзҰ»жҜҸеўһеҠ 100 зұі пјҢ зі»з»ҹеҸҜеўһеҠ 4 з§’зҡ„йў„иӯҰе’Ңеә”еҜ№ж—¶й—ҙ гҖӮ е¬ҙеҪ»з§‘жҠҖзҡ„и¶…й•ҝи·қзІҫеҮҶ 3D ж„ҹзҹҘжҠҖжңҜдёәиҮӘеҠЁй©ҫ驶еҚЎиҪҰжҳҫи‘—еўһеҠ жӣҙеӨҡзҡ„и·Ҝеҫ„йҖүжӢ©е’Ңжү§иЎҢж—¶й—ҙ пјҢ дёәиҮӘеҠЁй©ҫ驶еҚЎиҪҰзҡ„е®үе…ЁдёҺиҠӮиғҪеёҰжқҘдәҶзӘҒз ҙжҖ§жҸҗеҚҮзҡ„жңәдјҡ гҖӮ
жӣҙйҮҚиҰҒзҡ„дёҖзӮ№жҳҜ пјҢ иҝҷеҘ—ж–№жЎҲжІЎжңүз”ЁеҲ°йўқеӨ–зҡ„дј ж„ҹеҷЁ пјҢ еҖҹеҠ©зҺ°еңЁиҮӘеҠЁй©ҫ驶иҪҰиҫҶдёҠж Үй…Қзҡ„жҝҖе…үйӣ·иҫҫгҖҒдёӯз„Ұй•ҝз„Ұзӣёжңәе°ұеҸҜд»Ҙе®һзҺ° гҖӮ
д№ҹе°ұжҳҜиҜҙ пјҢ иҰҒжҠҠиҝҷеҘ—ж–№жЎҲеә”з”ЁеҲ°е®һйҷ…зҡ„иҮӘеҠЁй©ҫ驶йҮҚеҚЎдёҠ пјҢ дёҚйңҖиҰҒеңЁиҪҰдёҠеҠ иЈ…д»»дҪ•йўқеӨ–зҡ„硬件 пјҢ иҝӣиЎҢд»»дҪ•зЎ¬д»¶еұӮйқўдёҠзҡ„ж”№йҖ гҖҒеҚҮзә§ гҖӮ
иҖҢиҝҷж ·зҡ„ж“ҚдҪң пјҢ д№ҹз¬ҰеҗҲе¬ҙеҪ»вҖңиҪҰ规зә§ пјҢ еүҚиЈ…йҮҸдә§вҖқзҡ„и·Ҝзәҝ гҖӮ
вҖңжҲ‘们зҡ„зӣ®ж Үе°ұжҳҜйҮҸдә§вҖқ
жқЁзқҝеҲҡеҚҡеЈ«жҳҜе…ЁзҗғзҹҘеҗҚзҡ„и®Ўз®—жңәи§Ҷи§ү科еӯҰ家 пјҢ д№ӢеүҚжӢ…д»»зҷҫеәҰжңәеҷЁдәәе’ҢиҮӘеҠЁй©ҫ驶е®һйӘҢе®Өдё»д»»еҸҠйҰ–еёӯ3Dи§Ҷи§ү科еӯҰ家 гҖӮ
жҺЁиҚҗйҳ…иҜ»
















- йҖҡдҝЎжҠҖжңҜ|еӣҪ家з»ҹи®ЎеұҖпјҡдёҠеҚҠе№ҙе…ЁеӣҪе…үзјҶдә§йҮҸ1.32дәҝиҠҜеҚғзұі
- е…үзјҶдә§йҮҸе…үзәӨе…үзјҶ|2020дёҠеҚҠе№ҙе…ЁеӣҪе…үзјҶдә§йҮҸ1.32дәҝиҠҜеҚғзұі 2020е…үзәӨе…үзјҶжқҗж–ҷиЎҢдёҡеёӮеңәж·ұеәҰеҲҶжһҗ
- иҘҝи—Ҹжһ—иҠқеёӮжіўеҜҶеҺҝеҸ‘з”ҹ4.0зә§ең°йңҮ|иҘҝи—Ҹжһ—иҠқеёӮжіўеҜҶеҺҝеҸ‘з”ҹ4.0зә§ең°йңҮ йңҮжәҗж·ұеәҰ8еҚғзұі
- иҘҝи—Ҹжһ—иҠқеёӮжіўеҜҶеҺҝеҸ‘з”ҹ4.0зә§ең°йңҮ йңҮжәҗж·ұеәҰ8еҚғзұі
- жҙӘж°ҙжҢҒз»ӯдёӢжі„ й»„жІіеҸЈжІіжө·дәӨжұҮзәҝеҗ‘еӨ–жү©з§»зәҰ3еҚғзұі
- й»„жІі|жҙӘж°ҙжҢҒз»ӯдёӢжі„ й»„жІіеҸЈжІіжө·дәӨжұҮзәҝеҗ‘еӨ–жү©з§»зәҰ3еҚғзұі
- иҘҝи—Ҹжһ—иҠқеёӮжіўеҜҶеҺҝеҸ‘з”ҹ4.5зә§ең°йңҮ йңҮжәҗж·ұеәҰ8еҚғзұі
- ж–°з–Ҷе–Җд»Җең°еҢәеҸ¶еҹҺеҺҝеҸ‘з”ҹ3.2зә§ең°йңҮпјҢйңҮжәҗж·ұеәҰ8еҚғзұі
- еҚ—еҚ°еәҰжҙӢеҸ‘з”ҹ5.5зә§ең°йңҮпјҢйңҮжәҗж·ұеәҰ10еҚғзұі
- дёӯеӣҪең°йңҮеҸ°зҪ‘|иҗЁж‘©дәҡзҫӨеІӣең°еҢәеҸ‘з”ҹ6.1зә§ең°йңҮ йңҮжәҗж·ұеәҰ10еҚғзұі