「汇总」机器人弧焊自动化最全知识汇总具有收藏价值( 四 )
1、焊枪的分类
(1)半自动焊枪
半自动焊枪通常有两种形式:鹅颈式和手枪式。
1)鹅颈式焊枪
适合于小直径焊丝,使用灵活方便,特别适合于紧凑部位、难以达到的拐角处和某些受限制区域的焊接;
2)手枪式焊枪
适合于较大直径焊丝,它对于冷却效果要求较高,因而常采用内部循环水冷却。半自动焊焊枪可与送丝机构装在一起,也可分离。
(2)自动焊焊枪
自动焊焊枪的基本构造与半自动焊焊枪相同,但其载流容量较大,工作时间较长,有时要采用内部循环水冷却。焊枪直接装在焊接机头的下部,焊丝通过送丝轮和导丝管送进焊枪。
文章图片
2、供气系统和冷却水系统
(1)供气系统
供气系统与钨极氩弧焊相似,对于CO2气体,通常还需要安装预热器和干燥器,以吸收气体中的水分,防止焊缝中生成气孔。对于熔化极活性气体保护焊还需要安装气体混合装置,先将气体混合均匀,然后再送入焊枪。
(2)冷却水系统
冷却水系统由水箱、水泵和冷却水管及水压开关组成。水箱里的冷却水经水泵流经冷却水管,经水压开关后流入焊枪,然后经冷却水管再回流入水箱,形成冷却水循环。水压开关的作用是保证当冷却水未流经焊枪时,焊接系统不能起动焊接,以保护焊枪,避免由于未经冷却而烧坏。
3、焊枪服务中心
包括清枪剪丝装置,涂油装置,及TCP自动校正装置。可提高8%的正常运行时间。
?TCP自动定义
?TCP自动检查/更新
?TCP重复率+/-0.1mm
?工件质量稳定
更高系统可靠运行时间
11变位机
变位机一般与机器人联动,是机器人的一个附加轴,能配合机器人完成复杂工件的焊接,高性能的变位机重复精度能达到0.1mm。
12起始点寻位功能
1、焊前接触式传感;
2、自动寻找焊缝起点、终点及焊缝位置;
3、降低对工装夹具的定位精度要求。;
4、可实现3D导引;
5、快速搜寻,搜寻速度20~50mm/s,单点一方向搜寻时间2~6s;
6、导引精度±0.25mm。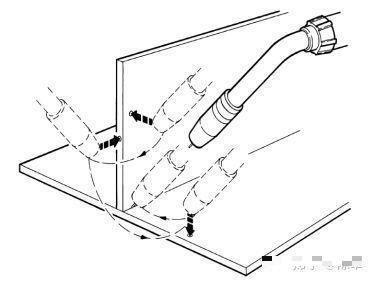
文章图片
13电弧跟踪及自适应功能
1、焊接过程中自动跟踪焊缝;
2、电弧作为传感装置;
3、装配、加工及焊接变形误差可以得到修正;
4、焊缝跟踪精度±0.1mm。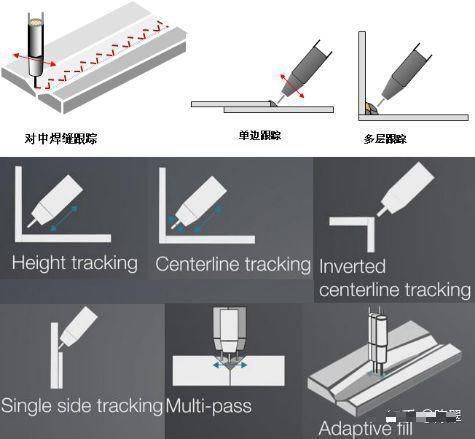
文章图片
14激光视觉焊缝传感
机器人采用的是主动跟踪的方式,机器人控制传感器:
1、焊枪的位置和焊接速度实时获取,控制方便,速度变化时易于调整。
2、可以方便的和外轴进行集成控制和同步
3、总线通讯方式,信息量丰富
15焊接后的质量检测
因视觉技术的发展,现在出现了线激光、白蓝光等技术,已能完成焊缝的质量检测,可以检测焊缝的起始点,焊缝高度,焊缝宽度,焊接缺陷及焊缝连续性等,甚至还能通过飞溅检测来判断焊接参数的合理性。让整个焊接自动化形成了一个制造闭环,为将来的机器学习打下了基础。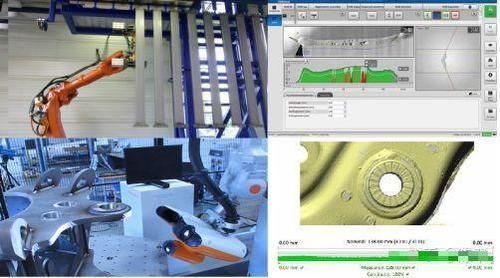
文章图片
令人惊讶的弧焊3D打印技术
深圳辰视智能科技有限公司是一家集机器视觉、工业智能化于一体的高新技术企业,是由一支中国科学院机器视觉技术研究的精英团队在深圳创立。
辰视智能拥有基于深度学习的三维视觉引导、机器人运动控制、视觉检测、三维建模等方面的核心技术,并研发了机器人三维视觉引导系统、机器人二维视觉引导系统、三维检测系统、产品外观检测系统等可根据客户需求定制化的智能产品。以高效·低成本·模块化的方式为自动化集成商、自动化设备厂商、机器人厂家提供机器视觉的相关解决方案。
推荐阅读











![中年|中衍期货[投资者教育]:把握基本面分析的关键点](http://ttbs.guangsuss.com/image/e5c932f8241a2808b298c8ad2947fb73)




- 换个角度看车市|深度:长城炮越野皮卡1.5万公里长测之技术状态汇总
- 电话营销机器人哪个比较好用
- 请问有哪些机器人大赛是比较权威的
- 汽车|2020年第48周上市新车汇总
- 全球|2021年河南公务员考试时政热点:12月1日国内外时事政治汇总
- 江苏省|江苏多地近期领导干部任前公示和人事任免汇总
- 二氧化硅|高中化学丨120个易错知识点汇总!
- 皮卡车市|近期皮卡新车汇总,9款全新产品,扭矩510/自动挡/国际范
- 中年|凯迪拉克CT5高配和低配有什么差别?我粗糙汇总一下两车配置差异
- 到底何为生命