科зҪ—жӢүеӨҡе·һз«ӢеӨ§еӯҰи®ҫи®ЎеҮәиғҪи®©ж— дәәжңәжӮ¬жҢӮеңЁзү©дҪ“дёҠзҡ„жңәжў°еӨ№е…·
жҚ®еӨ–еӘ’жҠҘйҒ“ пјҢ е°ҸеһӢеӣӣиҪҙйЈһиЎҢеҷЁжҲ–еҫ®еһӢйЈһиЎҢеҷЁ(MAV)зҡ„з”өжұ еҜҝе‘Ҫйқһеёёзҹӯ гҖӮ жүҖд»Ҙ пјҢ еҰӮжһңе®ғ们иғҪвҖңж –жҒҜвҖқеңЁжҹҗдёӘең°ж–№иҖҢдёҚжҳҜжӮ¬еҒңеңЁеҚҠз©әдёӯе°ұиғҪиҺ·еҫ—жӣҙеӨ§зҡ„еҠӣйҮҸ гҖӮ иҖғиҷ‘еҲ°иҝҷдёҖзӮ№ пјҢ дёҖз§Қж–°еһӢзҡ„еӨ№жҢҒжңәжһ„иў«и®ҫи®ЎдәҶеҮәжқҘ гҖӮ жҚ®жӮү пјҢ иҜҘи®ҫеӨҮз”ұ科зҪ—жӢүеӨҡе·һз«ӢеӨ§еӯҰзҡ„дёҖдёӘе·ҘзЁӢеёҲеӣўйҳҹејҖеҸ‘ пјҢ е®үиЈ…еңЁз¬¬дёүж–№еҫ®еһӢжңәеҷЁдәәзҡ„йЎ¶йғЁ гҖӮ
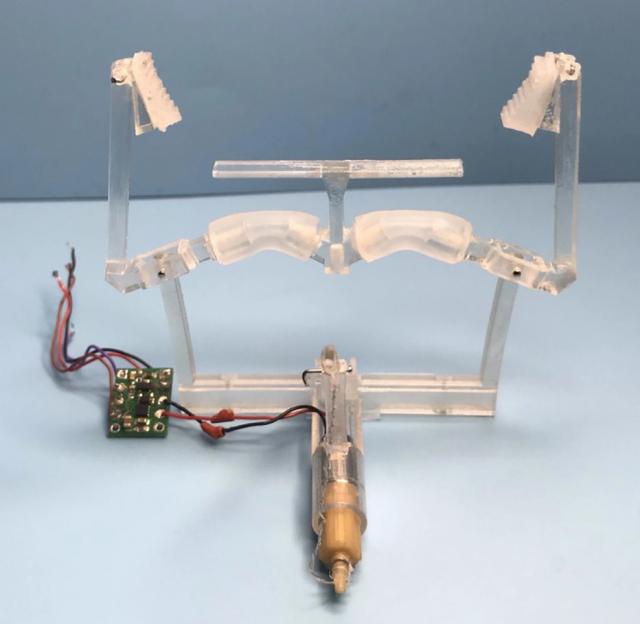
е®ғеңЁдёӯй—ҙжңүдёҖдёӘеһӮзӣҙзҡ„жҹұзҠ¶еһ« пјҢ е…¶иў«жңәжў°ең°иҝһжҺҘеҲ°дёӨдёӘеҜ№и§’дёҫиө·зҡ„жҠҳеҸ иҮӮ--дёҖиҫ№дёҖдёӘ гҖӮ еңЁжҜҸеҸӘжүӢиҮӮзҡ„дёҠз«ҜеҲҷжңүдёҖдёӘеҗ‘еҶ…зҡ„зҲӘеһ« гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
гҖҗ科зҪ—жӢүеӨҡе·һз«ӢеӨ§еӯҰи®ҫи®ЎеҮәиғҪи®©ж— дәәжңәжӮ¬жҢӮеңЁзү©дҪ“дёҠзҡ„жңәжў°еӨ№е…·гҖ‘еҪ“MAVйЈһеҗ‘ж°ҙе№ізү©дҪ“зҡ„еә•йқўеҰӮж ‘жһқгҖҒз®ЎйҒ“жҲ–ж ҸжқҶж—¶ пјҢ еҶІеҮ»еҠӣдјҡе°Ҷеһ«еӯҗеҗ‘дёӢжҺЁ гҖӮ иҝҷж ·е°ұдјҡдҪҝдёӨеҸӘжүӢиҮӮеҗ‘еҶ…жҠҳеҸ д»ҺиҖҢзҙ§зҙ§ең°жҠұдҪҸзү©дҪ“并е°Ҷж— дәәжңәеӣәе®ҡеңЁеҗҲйҖӮзҡ„дҪҚзҪ® гҖӮ 然еҗҺ пјҢ е®ғзҡ„иһәж—ӢжЎЁеҸ‘еҠЁжңәеңЁжӯӨж—¶е°ұеҸҜд»Ҙе…ій—ӯзӣҙеҲ°йңҖиҰҒеҶҚж¬ЎйЈһиЎҢеҶҚйҮҚж–°ејҖеҗҜ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
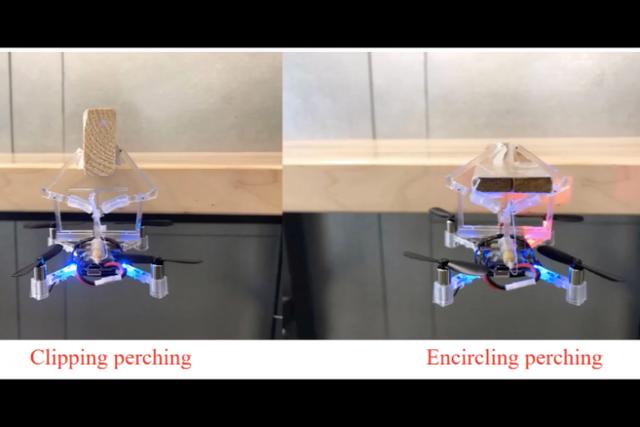
ж №жҚ®зү©дҪ“зҡ„зӣҙеҫ„ пјҢ жңәжў°иҮӮеҸҜд»Ҙз”Ёе®ғ们зҡ„зҲӘеһ«д»ҺдёӨиҫ№жҠ“дҪҸзү©дҪ“ пјҢ д№ҹеҸҜд»ҘзҺҜз»•зү©дҪ“并еңЁдёҠйқўдјҡеҗҲ гҖӮ еңЁиҝҷдёӨз§Қжғ…еҶөдёӢ пјҢ жҠ“еҸ–еҠЁдҪңе®Ңе…ЁжҳҜжңәжў°зҡ„иҖҢдёҚйңҖиҰҒз”өеҠӣ гҖӮ еҪ“йҷҚиҗҪ并жҒўеӨҚйЈһиЎҢж—¶еҲҷйңҖиҰҒе°‘йҮҸзҡ„еҠӣйҮҸе°Ҷжңәжў°жүӢиҮӮеҲҶејҖ гҖӮ
ејҖеҸ‘еӣўйҳҹжҲҗе‘ҳJianguo ZhaoеҚҡеЈ«иҜҙйҒ“пјҡвҖңиҷҪ然жҲ‘们зҡ„еҸҢзЁізҲӘз”ЁдәҺжүӢжҺҢеӨ§е°Ҹзҡ„еӣӣиҪҙйЈһиЎҢеҷЁ пјҢ дҪҶиҝҷз§Қи®ҫи®Ўзӯ–з•Ҙд№ҹеҸҜд»Ҙиў«еә”з”ЁеҲ°еӨ§е°әеҜёзҡ„еҫ®еһӢйЈһиЎҢеҷЁд»ҺиҖҢз”ЁдәҺй«ҳж•Ҳзҡ„еҒңз•ҷе’Ңз©әдёӯжҠ“еҸ– гҖӮ вҖқ
жҚ®жӮү пјҢ иҝҷдёӘеӨ№е…·еңЁдёӢйқўзҡ„и§Ҷйў‘дёӯиҝӣиЎҢдәҶжј”зӨә пјҢ 并еңЁжңҖиҝ‘еҸ‘иЎЁеңЁгҖҠIEEE ExploreгҖӢдёҠзҡ„дёҖзҜҮи®әж–ҮдёӯиҝӣиЎҢдәҶйҳҗиҝ° гҖӮ
жҺЁиҚҗйҳ…иҜ»














- ж—Ҙжң¬е·ҘзЁӢеёҲпјҡжҪҳеӨҡжӢүйӯ”зӣ’иў«зҫҺеӣҪжү“ејҖпјҢдёӯеӣҪеҠһиҠҜзүҮеӨ§еӯҰеҸӘдёәжү“з ҙзҰҒд»Ө
- еҚЎеҶ…еҹәжў…йҡҶеӨ§еӯҰжҸҗеҮәдәҶжӣҙеҘҪзҡ„ејәеҜҶз Ғи®ҫзҪ®е»әи®®
- е»әи®ҫ|ж Ўең°еҗҲдҪң з»өйҳіж¶ӘеҹҺеҢәжҗәжүӢжөҷжұҹеӨ§еӯҰеҸ‘еёғ5gеҲӣж–°жҲҗжһң
- еҸҲжҳҜеҲ«дәә家зҡ„еӯ©еӯҗпјҹе®ҝиҲҚдёІй—ЁиҜ·е…ҲеҲ·жҢҮзә№ иҘҝз”өеӨ§еӯҰз”ҹиҮӘеҲ¶и¶Је‘іжҷәиғҪй”ҒжҲҗвҖңзҪ‘зәўвҖқ
- жҷ®йҖҡеӨ§еӯҰи®Ўз®—жңәдё“дёҡзҡ„жң¬з§‘з”ҹпјҢиҜҘйҖүжӢ©дё»ж”»еүҚз«ҜиҝҳжҳҜJava
- жөҷжұҹжҗәжүӢиӢұеӣҪиҘҝиӢҸж је…°еӨ§еӯҰе…ұе»әеҲӣж–°еҹәең°
- еҜјиҲӘ|ж”»еқҡвҖңеҚ«жҳҹеҜјиҲӘдҝЎеҸ·ејұвҖқйҡҫйўҳпјҢй«ҳеҫ·зЁӢеәҸе‘ҳиҒ”жүӢжӯҰеӨ§еӯҰеӯҗеӨәеҫ—еӣҪйҷ…е®ӨеҶ…е®ҡдҪҚеӨ§иөӣеҶ еҶӣ
- жё…еҚҺеӨ§еӯҰз ”з©¶йҷўеҮәжүӢпјҒж“ҰдёҖж¬ЎпјҢжҢҒз»ӯ24е°Ҹж—¶йҳІйӣҫпјҢж”№еҸҳзңјй•ңе…ҡдҪ“йӘҢ
- еҢ—еӨ§жңҖеӨ§еҚ•дҪ“е»әи®ҫйЎ№зӣ®е°ҒйЎ¶
- йҰ–家"иҠҜзүҮеӨ§еӯҰ"еҚіе°ҶиҗҪжҲҗпјҢзӣ–иҢЁпјҡдёӯеӣҪиҠҜе°Ҷеҙӣиө·пјҢзҫҺеӣҪе°ҶеӨ§йҮҸеӨұдёҡ