иӢ№жһң12зҡ„жҝҖе…үйӣ·иҫҫпјҢе°ұиҝһNASAд№ҹдјҡеңЁдёӢж¬ЎзҒ«жҳҹзҷ»йҷҶдёӯз”ЁеҲ°е®ғпјҹ( еӣӣ )
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
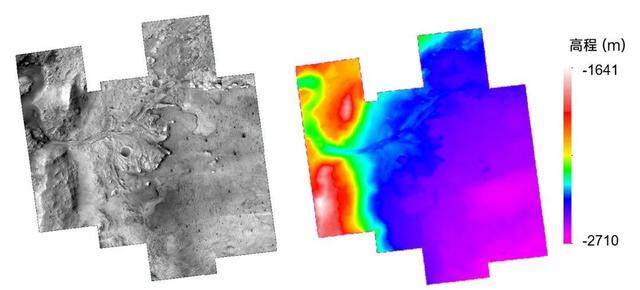
пјҲе·ҰпјүеҶҘзҺӢеҸ·зҡ„жҝҖе…үжөӢй«ҳи®ЎпјҲOLAпјү| еҠ жӢҝеӨ§е®ҮиҲӘеұҖ пјҲеҸіпјүOLAиҺ·еҸ–зҡ„е°ҸиЎҢжҳҹиҙқеҠӘ3Dең°еҪўжЁЎеһӢ пјҢ и¶Ҡзәўи¶Ҡй«ҳ пјҢ и¶Ҡи“қи¶ҠдҪҺ | NASA/University of Arizona/CSA/York/MDA
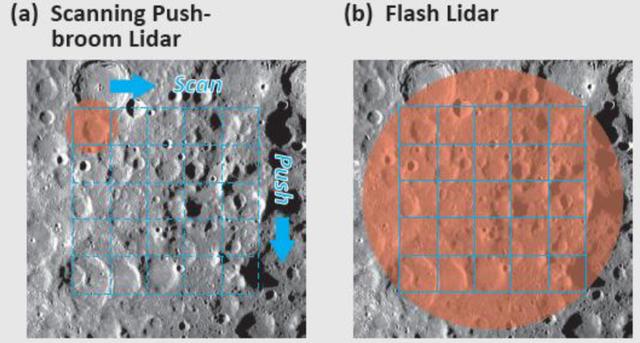
еҶҘзҺӢеҸ·иө·еҲқд№ҹжҳҜжү“з®—дҪҝз”ЁLiDARдҪңдёәзқҖйҷҶйҮҮж ·йҳ¶ж®өзҡ„дё»еҜјиҲӘе®ҡдҪҚжҠҖжңҜжқҘзқҖпјҡйҷӨдәҶжү«жҸҸејҸLiDARвҖ”вҖ”жҝҖе…үжөӢй«ҳи®ЎпјҲOLAпјү пјҢ еҶҘзҺӢеҸ·иҝҳй…ҚеӨҮдәҶдёҖеҸ°3Dеҝ«й—ӘLiDARз”ЁдәҺйҷҚиҗҪиҝҮзЁӢдёӯзҡ„жөӢи·қе’Ңе®ҡдҪҚ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
жү«жҸҸејҸLiDAR vs еҝ«й—ӘејҸLiDAR | еҸӮиҖғж–ҮзҢ® [5]
еҶҘзҺӢеҸ·з”ЁдәҺиҫ…еҠ©йҷҚиҗҪзҡ„еҝ«й—ӘLiDARй•ҝиҝҷж ·в–ј
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
еҶҘзҺӢеҸ·зҡ„ASC LiDAR | еҸӮиҖғж–ҮзҢ® [6]
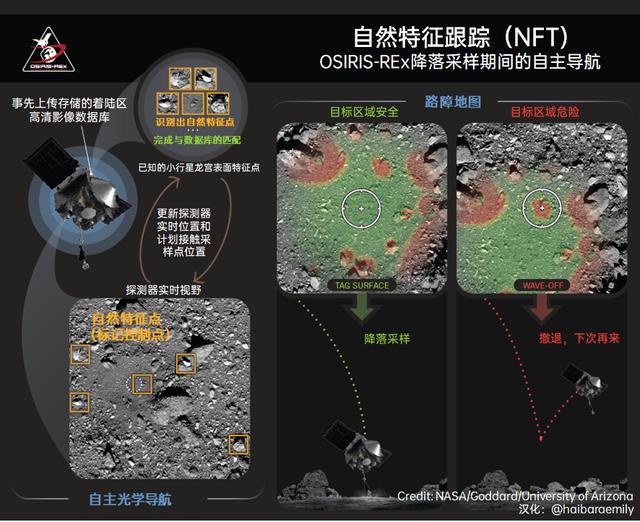
然иҖҢеҲ°ең°е„ҝдёҖзңӢжүҚеҸ‘зҺ° пјҢ иҙқеҠӘиЎЁйқўи¶…еҮәйў„ж–ҷең°еҙҺеІ–еӨҡзҹі пјҢ жҺўжөӢеҷЁж №жң¬жІЎең°е„ҝдёӢи„ҡйҮҮж ·жқҶ пјҢ еҶҘзҺӢеҸ·еӣўйҳҹдёҚеҫ—дёҚжҠҠе®үе…ЁзқҖйҷҶеҢәиҢғеӣҙд»ҺеҺҹи®ЎеҲ’зҡ„50зұізӣҙеҫ„зј©е°ҸеҲ°дәҶ16зұізӣҙеҫ„ гҖӮ дёәдәҶиҗҪеҫ—жӣҙеҮҶ пјҢ NASAжңҖз»Ҳж”ҫејғдәҶLiDAR пјҢ ж”№з”ЁдәҶеҸҰдёҖеҘ—еҹәдәҺе…үеӯҰеҪұеғҸзҡ„еӨҮз”ЁеҜјиҲӘе®ҡдҪҚж–№жЎҲвҖ”вҖ”иҮӘ然зү№еҫҒи·ҹиёӘпјҲNatural Feature Tracking пјҢ NFT)жҠҖжңҜ гҖӮ еҶҘзҺӢеҸ·еңЁйҷҚиҗҪиҝҮзЁӢдёӯдёҚж–ӯе®һж—¶жӢҚж‘„зқҖйҷҶеҢәйҷ„иҝ‘зҡ„з…§зүҮ пјҢ з”Ёиҝҷдәӣз…§зүҮе’Ңе·Іжңүзҡ„дёүз»ҙең°еҪўе’ҢеҪұеғҸж•°жҚ®еә“жҜ”еҜ№ пјҢ еҢ№й…ҚзқҖйҷҶеҢәдёҖеёҰзҡ„зү№еҫҒзҹіеқ—дҪңдёәең°ж Ү пјҢ е°ұеҸҜд»Ҙжӣҙж–°иҮӘе·ұзҡ„е®һж—¶дҪҚзҪ®е’Ңи®ЎеҲ’йҮҮж ·дҪҚзҪ® пјҢ еҰӮжһңжЈҖжөӢеҲ°жӢҚж‘„зҡ„еҪұеғҸйҮҢжңүеҚұйҷ©йҡңзўҚзү©иҝҳеҸҜд»ҘиҮӘдё»ж’ӨзҰ» [7] гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
еҶҘзҺӢеҸ·зҡ„иҮӘ然зү№еҫҒи·ҹиёӘпјҲNFTпјүжҠҖжңҜ | ? NASA/Goddard/University of Arizona [7] жұүеҢ–пјҡ@haibaraemily
еҶҘзҺӢеҸ·жҺўжөӢеҷЁе·Із»ҸеңЁдёӨж¬ЎзқҖйҷҶйҮҮж ·жј”д№ дёӯйӘҢиҜҒдәҶNFTжҠҖжңҜзҡ„еҸҜйқ жҖ§ пјҢ д№ҹе°ҶеңЁ10жңҲ20ж—Ҙзҡ„е®һйҷ…зқҖйҷҶйҮҮж ·иҝҮзЁӢдёӯдҪҝз”Ёиҝҷз§ҚжҠҖжңҜиҫ…еҠ©зІҫзЎ®зқҖйҷҶ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
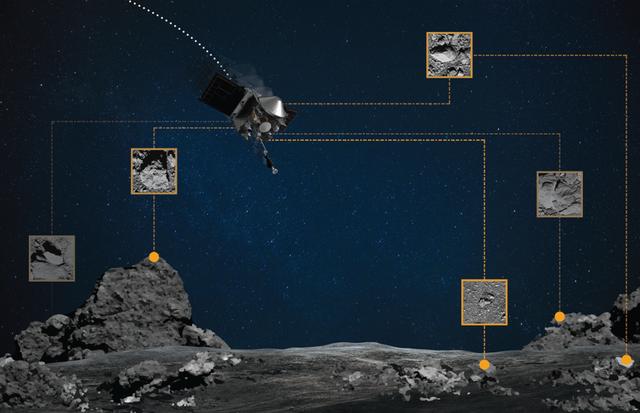
дҪҝз”ЁиҮӘ然зү№еҫҒи·ҹиёӘпјҲNFTпјүжҠҖжңҜдёӢйҷҚдёӯзҡ„еҶҘзҺӢеҸ·жҺўжөӢеҷЁзӨәж„Ҹеӣҫ | ? NASA/Goddard/University of Arizona [7]
жҜ…еҠӣеҸ·йҷҚиҗҪиҝҮзЁӢзңҹзҡ„дјҡз”ЁLiDARеҗ—пјҹйӮЈиӢ№жһңжүҖиҜҙзҡ„NASAдёӢдёҖдёӘзҒ«жҳҹд»»еҠЎ пјҢ жӯЈеңЁи·ҜдёҠзҡ„жҜ…еҠӣеҸ·зҒ«жҳҹиҪҰе‘ўпјҹж— зӢ¬жңүеҒ¶ пјҢ дёәдәҶиҗҪеҫ—жӣҙеҮҶжӣҙе®үе…Ё пјҢ NASAе…¶е®һд№ҹж—©е·ІеҶіе®ҡеңЁжҜ…еҠӣеҸ·йҷ©иұЎзҺҜз”ҹзҡ„вҖңжҒҗжҖ–дёғеҲҶй’ҹвҖқзқҖйҷҶиҝҮзЁӢйҮҢеҗҜз”ЁеҹәдәҺе…үеӯҰеҪұеғҸзҡ„ж–°жҠҖжңҜдәҶ гҖӮ
жҜ…еҠӣеҸ·зҒ«жҳҹиҪҰиҝҷж¬ЎеҗҜз”Ёзҡ„йҷҚиҗҪеҜјиҲӘж–°жҠҖжңҜеҸ«зӣёеҜ№ең°еҪўеҜјиҲӘпјҲTerrain Relative Navigation пјҢ TRNпјү пјҢ жң¬иҙЁдёҠе’ҢеҶҘзҺӢеҸ·зҡ„иҮӘ然зү№еҫҒи·ҹиёӘпјҲNatural Feature Tracking пјҢ NFT)жҠҖжңҜзұ»дјј пјҢ йғҪжҳҜеҹәдәҺжҺўжөӢеҷЁйҷҚиҗҪж—¶е®һж—¶жӢҚж‘„зҡ„зқҖйҷҶеҢәе…үеӯҰеҪұеғҸеҢ№й…Қж•°жҚ®еә“ пјҢ дёҚж–ӯжӣҙж–°иҮӘе·ұзҡ„дҪҚзҪ®пјҲе®ҡдҪҚзІҫеәҰдјҳдәҺ40зұіпјү гҖӮ иҝҷз§Қж–№жі•еҸҜд»Ҙеё®еҠ©жҺўжөӢеҷЁйҒҝејҖзқҖйҷҶжӨӯеңҶеҶ…зҡ„е°Ҹе°әеәҰйҡңзўҚ пјҢ жӣҙзҒөжҙ»ең°йҖүжӢ©зқҖйҷҶзӮ№ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
жҜ…еҠӣеҸ·еҹәдәҺTRNжҠҖжңҜзҡ„йҷҚиҗҪйҒҝйҡңиҝҮзЁӢзӨәж„Ҹеӣҫ | NASA/JPL-Caltech [8]
йӮЈжҜ…еҠӣеҸ·зҒ«жҳҹиҪҰжҺҘдёӢжқҘзҡ„зқҖйҷҶиҝҮзЁӢдёӯдјҡдёҚдјҡз”ЁеҲ°LiDARе‘ўпјҹжҲ‘и®ӨзңҹжҹҘдәҶдёҖдёӢ пјҢ еҸ‘зҺ°иҝҳзңҹиҜҙдёҚеҮҶвҖҰ
зӣёеҜ№ең°еҪўеҜјиҲӘпјҲTRNпјүжҠҖжңҜзҡ„е®һзҺ° пјҢ йқ зҡ„жҳҜй«ҳзІҫеәҰзҡ„ең°еӣҫж•°жҚ®еә“зі»з»ҹ гҖӮ еңЁжҜ…еҠӣеҸ·еҮәеҸ‘д№ӢеүҚ пјҢ NASAе°ұе°ҶзқҖйҷҶеҢәдёҖеёҰиҝ„д»ҠдёәжӯўжңҖй«ҳжё…зҡ„ең°еҪўе’ҢеҪұеғҸең°еӣҫиҫ“е…ҘдәҶжҜ…еҠӣеҸ·зҡ„зқҖйҷҶеҷЁи§Ҷи§үзі»з»ҹпјҲLander Visions System пјҢ LVS пјүдёӯ гҖӮ иҝҷеҘ—зі»з»ҹе°ҶдҪңдёәжҜ…еҠӣеҸ·зқҖйҷҶж—¶вҖңи„‘еӯҗвҖқйҮҢзҡ„зҒ«жҳҹзңҹе®һең°еҪўең°иІҢеҸӮиҖғ гҖӮ
 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫ
жҜ…еҠӣеҸ·LVSзі»з»ҹжҗӯиҪҪзҡ„зқҖйҷҶеҢәдёҖеёҰHiRISEеҸҜи§Ғе…үеҪұеғҸпјҲ25еҺҳзұі/еғҸзҙ пјүе’Ңең°еҪўпјҲ1 зұі/еғҸзҙ пјүж•°жҚ® | NASA
жҺЁиҚҗйҳ…иҜ»













- дёҚйҖҒе……з”өеҷЁиҖіжңәпјҢиӢ№жһңдёҖе№ҙиғҪзңҒ17дәҝпјҹеә“е…Ӣзҡ„е°Ҹз®—зӣҳжү“еҫ—зңҹеҘҪ
- 马ж–Ҝе…ӢеҲҡжҲҗе…ЁзҗғйҰ–еҜҢпјҢиЎҢдёҡеҸҲзҲҶйҮҚзЈ…ж–°й—»пјҒзҷҫеәҰиҰҒйҖ жұҪиҪҰдәҶпјҢеҗҲдҪңж–№жҳҜе®ғпјҒдј дёҺиӢ№жһңеҗҲдҪңйҖ иҪҰпјҢйҹ©еӣҪжұҪиҪҰе·ЁеӨҙиӮЎд»·жҡҙж¶Ё
- SatechiжҺЁеҮәж–°ж¬ҫй“қеҲ¶иӢ№жһңй”®зӣҳдёҺiPadж”Ҝжһ¶й…Қ件
- з ”з©¶з§°iPhone 12еӣҪиЎҢ128GBзү©ж–ҷжҲҗжң¬жҸҗй«ҳдәҶ21%пјҡиӢ№жһңеҠ еҖҚиҪ¬е«Ғз»ҷж¶Ҳиҙ№иҖ…
- з”ЁжҲ·|е…ғж—ҰеҪ“еӨ©иӢ№жһңеә”з”Ёж¶Ҳиҙ№йўқи¶…иҝҮ5.4дәҝзҫҺе…ғ еҲ·ж–°еҚ•ж—Ҙж¶Ҳиҙ№и®°еҪ•
- е°Ҹзұіжңүе“Ғдј—зӯ№жҝҖе…үйј»зӮҺжІ»з–—д»ӘпјҡдёҚеҗғиҚҜ дёҚејҖеҲҖ
- иӢ№жһңеҲӣе§Ӣдәәд№”еёғж–Ҝзҡ„дј еҘҮдәәз”ҹпјҡйҖ е°ұдәҶиӢ№жһңзҡ„е·…еі°пјҢе…¶е®һжІЎйӮЈд№Ҳе®ҢзҫҺ
- дёҖеҲҷж¶ҲжҒҜдј жқҘпјҢиӢ№жһңiPhone12еҶҚзҺ°й—®йўҳпјҢвҖңжһңзІүвҖқжңүзӮ№ж…Ң
- иӢ№жһңдёӨж¬ҫж–°iPadйҪҗжӣқе…үпјҡжҖ§иғҪжҸҗй«ҳгҖҒе…Ҙй—Ёж¬ҫжӣҙиҪ»и–„гҖҒе”®д»·дҫҝе®ң
- Facebookеҗ‘е®ўжҲ·еҸ‘йӮ®д»¶пјҡеҜ№иӢ№жһңйҡҗз§Ғ新规вҖңеҲ«ж— йҖүжӢ©вҖқ