йқўиҜ•е®ҳпјҡиҒҠиҒҠ etcd дёӯзҡ„ Raft еҗ§( дёү )
raftLog з”ұд»ҘдёӢжҲҗе‘ҳз»„жҲҗпјҡ
- storage StorageпјҡеүҚйқўжҸҗеҲ°зҡ„еӯҳж”ҫе·Із»ҸжҢҒд№…еҢ–ж•°жҚ®зҡ„ Storage жҺҘеҸЈ гҖӮ
- unstable unstableпјҡеүҚйқўеҲҶжһҗиҝҮзҡ„ unstable з»“жһ„дҪ“ пјҢ з”ЁдәҺдҝқеӯҳеә”з”ЁеұӮиҝҳжІЎжңүжҢҒд№…еҢ–зҡ„ж•°жҚ® гҖӮ
- committed uint64пјҡдҝқеӯҳеҪ“еүҚжҸҗдәӨзҡ„ж—Ҙеҝ—ж•°жҚ®зҙўеј• гҖӮ
- applied uint64пјҡдҝқеӯҳеҪ“еүҚдј е…ҘзҠ¶жҖҒжңәзҡ„ж•°жҚ®жңҖй«ҳзҙўеј• гҖӮ
raftLog з»“жһ„дҪ“дёӯ пјҢ еҮ йғЁеҲҶж•°жҚ®зҡ„жҺ’еҲ—еҰӮдёӢеӣҫжүҖзӨә2[14]пјҡ
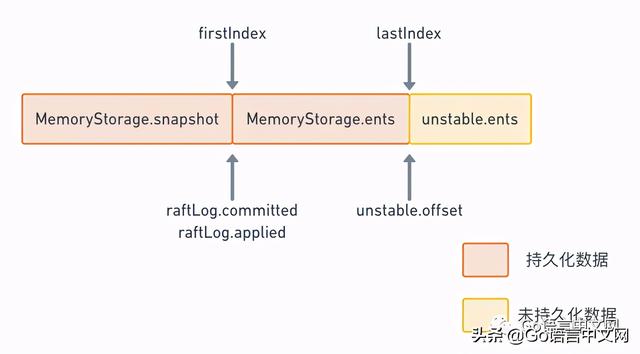 ж–Үз« жҸ’еӣҫ
ж–Үз« жҸ’еӣҫRaftLog Layout
иҝҷдёӘж•°жҚ®жҺ’еёғзҡ„жғ…еҶө пјҢ еҸҜд»Ҙд»Һ raftLog зҡ„еҲқе§ӢеҢ–еҮҪж•°дёӯзңӢеҮәжқҘпјҡ
// #L45// newLog returns log using the given storage. It recovers the log to the state// that it just commits and applies the latest snapshot.func newLog(storage Storage, logger Logger) *raftLog {if storage == nil {log.Panic("storage must not be nil")}log :=--tt-darkmode-color: #EF7060;">Storageз®ЎзҗҶзҡ„е·Із»ҸжҢҒд№…еҢ–зҡ„ж•°жҚ® пјҢ иҖҢеңЁжӯӨд№ӢеҗҺйғҪжҳҜunstableз®ЎзҗҶзҡ„иҝҳжІЎжңүжҢҒд№…еҢ–зҡ„ж•°жҚ® гҖӮ
д»ҘдёҠеҲҶжһҗдёӯиҝҳжңүдёҖдёӘз–‘й—® пјҢ дёәд»Җд№Ҳ并没жңүеҲқе§ӢеҢ– unstable.snapshot жҲҗе‘ҳ пјҢ д№ҹе°ұжҳҜ unstable з»“жһ„дҪ“зҡ„еҝ«з…§ж•°жҚ®пјҹеҺҹеӣ еңЁдәҺ пјҢ дёҠйқўиҝҷдёӘжҳҜеҲқе§ӢеҢ–еҮҪж•° пјҢ д№ҹе°ұжҳҜиҠӮзӮ№еҲҡеҗҜеҠЁзҡ„ж—¶еҖҷи°ғз”ЁжқҘеҲқе§ӢеҢ–еӯҳеӮЁзҠ¶жҖҒзҡ„еҮҪж•° пјҢ иҖҢ unstable.snapshot ж•°жҚ® пјҢ жҳҜеңЁеҗҜеҠЁд№ӢеҗҺеҗҢжӯҘж•°жҚ®зҡ„иҝҮзЁӢдёӯ пјҢ еҰӮжһңйңҖиҰҒеҗҢжӯҘеҝ«з…§ж•°жҚ®ж—¶жүҚдјҡеҺ»иҝӣиЎҢиөӢеҖјдҝ®ж”№зҡ„ж•°жҚ® пјҢ еӣ жӯӨеңЁиҝҷйҮҢ并没жңүеҜ№е®ғиҝӣиЎҢж“ҚдҪңзҡ„ең°ж–№ гҖӮ
progress.goLeader йҖҡиҝҮProgressиҝҷдёӘж•°жҚ®з»“жһ„жқҘиҝҪиёӘдёҖдёӘ follower зҡ„зҠ¶жҖҒ пјҢ е№¶ж №жҚ®ProgressйҮҢзҡ„дҝЎжҒҜжқҘеҶіе®ҡжҜҸж¬ЎеҗҢжӯҘзҡ„ж—Ҙеҝ—йЎ№ гҖӮ иҝҷйҮҢд»Ӣз»ҚдёүдёӘжҜ”иҫғйҮҚиҰҒзҡ„еұһжҖ§пјҡ
// #L37// Progress represents a followerвҖҷs progress in the view of the leader. Leader maintains// progresses of all followers, and sends entries to the follower based on its progress.type Progress struct {Match, Next uint64State ProgressStateTypeins *inflights}- з”ЁжқҘдҝқеӯҳеҪ“еүҚ follower иҠӮзӮ№зҡ„ж—Ҙеҝ—зҠ¶жҖҒзҡ„еұһжҖ§пјҡеңЁжӯЈеёёжғ…еҶөдёӢ пјҢ Next = Match + 1 пјҢ д№ҹе°ұжҳҜдёӢдёҖдёӘиҰҒеҗҢжӯҘзҡ„ж—Ҙеҝ—еә”еҪ“жҳҜеҜ№ж–№е·Іжңүж—Ҙеҝ—зҡ„дёӢдёҖжқЎ гҖӮ
- Matchпјҡдҝқеӯҳзӣ®еүҚдёәжӯў пјҢ е·ІеӨҚеҲ¶з»ҷиҜҘ follower зҡ„ж—Ҙеҝ—зҡ„жңҖй«ҳзҙўеј•еҖј гҖӮ еҰӮжһң leader еҜ№иҜҘ follower дёҠзҡ„ж—Ҙеҝ—жғ…еҶөдёҖж— жүҖзҹҘзҡ„иҜқ пјҢ иҝҷдёӘеҖјиў«и®ҫдёә 0 гҖӮ
- NextпјҡдҝқеӯҳдёӢдёҖж¬Ў leader еҸ‘йҖҒ append ж¶ҲжҒҜз»ҷиҜҘ follower зҡ„ж—Ҙеҝ—зҙўеј• пјҢ еҚідёӢдёҖж¬ЎеӨҚеҲ¶ж—Ҙеҝ—ж—¶ пјҢ leader дјҡд»ҺNextејҖе§ӢеҸ‘йҖҒж—Ҙеҝ— гҖӮ
- StateеұһжҖ§з”ЁжқҘдҝқеӯҳиҜҘиҠӮзӮ№еҪ“еүҚзҡ„еҗҢжӯҘзҠ¶жҖҒ пјҢ е®ғдјҡжңүдёҖдёӢеҮ з§ҚеҸ–еҖј3[15]пјҡжҺўжөӢзҠ¶жҖҒ пјҢ еҪ“ follower жӢ’з»қдәҶжңҖиҝ‘зҡ„ append ж¶ҲжҒҜж—¶ пјҢ йӮЈд№Ҳе°ұдјҡиҝӣе…ҘжҺўжөӢзҠ¶жҖҒ пјҢ жӯӨж—¶ leader дјҡиҜ•еӣҫ继з»ӯеҫҖеүҚиҝҪжәҜиҜҘ follower зҡ„ж—Ҙеҝ—д»Һе“ӘйҮҢејҖе§ӢдёўеӨұзҡ„ гҖӮ еңЁ probe зҠ¶жҖҒж—¶ пјҢ leader жҜҸж¬ЎжңҖеӨҡ append дёҖжқЎж—Ҙеҝ— пјҢ еҰӮжһң收еҲ°зҡ„еӣһеә”дёӯеёҰжңүRejectHintдҝЎжҒҜ пјҢ еҲҷеӣһйҖҖNextзҙўеј• пјҢ д»ҘдҫҝдёӢж¬ЎйҮҚиҜ• гҖӮ еңЁеҲқе§Ӣж—¶ пјҢ leader дјҡжҠҠжүҖжңү follower зҡ„зҠ¶жҖҒи®ҫдёә probe пјҢ еӣ дёәе®ғ并дёҚзҹҘйҒ“еҗ„дёӘ follower зҡ„еҗҢжӯҘзҠ¶жҖҒ пјҢ жүҖд»ҘйңҖиҰҒж…ўж…ўиҜ•жҺў гҖӮ еҪ“ leader зЎ®и®ӨжҹҗдёӘ follower зҡ„еҗҢжӯҘзҠ¶жҖҒеҗҺ пјҢ е®ғе°ұдјҡжҠҠиҝҷдёӘ follower зҡ„ state еҲҮжҚўеҲ°иҝҷдёӘзҠ¶жҖҒ пјҢ 并且用pipelineзҡ„ж–№ејҸеҝ«йҖҹеӨҚеҲ¶ж—Ҙеҝ— гҖӮ leader еңЁеҸ‘йҖҒеӨҚеҲ¶ж¶ҲжҒҜд№ӢеҗҺ пјҢ е°ұдҝ®ж”№иҜҘиҠӮзӮ№зҡ„Nextзҙўеј•дёәеҸ‘йҖҒж¶ҲжҒҜзҡ„жңҖеӨ§зҙўеј•+1 гҖӮ жҺҘ收еҝ«з…§зҠ¶жҖҒ гҖӮ еҪ“ leader еҗ‘жҹҗдёӘ follower еҸ‘йҖҒ append ж¶ҲжҒҜ пјҢ иҜ•еӣҫи®©иҜҘ follower зҠ¶жҖҒи·ҹдёҠ leader ж—¶ пјҢ еҸ‘зҺ°жӯӨж—¶ leader дёҠдҝқеӯҳзҡ„зҙўеј•ж•°жҚ®е·Із»ҸеҜ№дёҚдёҠдәҶ пјҢ жҜ”еҰӮ leader еңЁ index дёә 10 д№ӢеүҚзҡ„ж•°жҚ®йғҪе·Із»ҸеҶҷе…Ҙеҝ«з…§дёӯдәҶ пјҢ дҪҶжҳҜиҜҘ follower йңҖиҰҒзҡ„жҳҜ 10 д№ӢеүҚзҡ„ж•°жҚ® пјҢ жӯӨж—¶е°ұдјҡеҲҮжҚўеҲ°иҜҘзҠ¶жҖҒдёӢ пјҢ еҸ‘йҖҒеҝ«з…§з»ҷиҜҘ follower гҖӮ еҪ“еҝ«з…§ж•°жҚ®еҗҢжӯҘиҝҪдёҠд№ӢеҗҺ пјҢ 并дёҚжҳҜзӣҙжҺҘеҲҮжҚўеҲ° Replicate зҠ¶жҖҒ пјҢ иҖҢжҳҜйҰ–е…ҲеҲҮжҚўеҲ° Probe зҠ¶жҖҒ гҖӮ
жҺЁиҚҗйҳ…иҜ»
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- иҒҠиҒҠзҪ‘жҳ“дә‘йҹід№җпјҡвҖңеҝғеҠЁжЁЎејҸвҖқ
- еҚҺдёәзӘҒ然宣еёғпјҒи…ҫи®Ҝд№ҹжІЎжңүжғіеҲ°пјҢдёҖеҲҮжқҘеҫ—еҰӮжӯӨеҝ«
- е…ЁзҗғжңҖеҸ—ж¬ўиҝҺзҡ„4йғЁ5GжүӢжңәпјҡйқ йҮҸеҸ–иғңзҡ„е°Ҹзұіз«ҹжҰңдёҠж— еҗҚпјҹ
- JavaеӯҰд№ пјҡJavaеӯҰд№ еҲ°д»Җд№ҲзЁӢеәҰеҸҜд»ҘиҝӣиЎҢйқўиҜ•
- зЁӢеәҸе‘ҳйқўиҜ•йҮ‘е…ё17.05_go_еӯ—жҜҚдёҺж•°еӯ—
- е®үеҚ“жҳҘжӢӣйқўз»ҸпјҡдәҢжң¬жёЈйҷўйқўиҜ•зҪ‘жҳ“иў«жӢ’пјҢжңҖз»ҲиҺ·и…ҫи®ҜйҳҝйҮҢoffer
- дёӯеӣҪжңҖиөҡй’ұзҡ„е…¬еҸёиҜһз”ҹпјҒдёҚжҳҜ移еҠЁпјҢд№ҹдёҚжҳҜйҳҝйҮҢе·ҙе·ҙпјҢйӮЈз¬¬дёҖжҳҜпјҹ
- гҖҢ6гҖҚиҝӣеӨ§еҺӮеҝ…йЎ»жҺҢжҸЎзҡ„йқўиҜ•йўҳ-Hibernate
- й«ҳйҖҡйӘҒйҫҷ888жҸҗеүҚжқҘдәҶпјҒеҚҺдёәвҖңж…ҢвҖқдәҶпјҹдҪҶдёҖеҲҮиҝҳжІЎжңүе®ҡи®ә
- йңҮжғҠпјҒдә¬дёңT4еӨ§дҪ¬йқўиҜ•ж•ҙж•ҙдёүдёӘжңҲпјҢжүҚеҶҷдәҶдёӨд»ҪjavaйқўиҜ•з¬”и®°
















![[дёӨеј№дёҖжҳҹ]е”ҜдёҖеңЁеӨ©з©әй—ӘзғҒзҡ„зүӣйғҺз»ҮеҘі дёӨеј№дёҖжҳҹзғҲеЈ«е’ҢжңҖзҫҺйҷўеЈ«еңЁеӨ©дёҠзӣёдјҡ](https://p0.ssl.qhimgs4.com/t010247be3077dad79a.jpg?size=600x400)

