来源:环球网
【环球网科技综合报道】11月20日 , 腾讯公布了其在移动机器人研究方面的新进展:四足移动机器人 Jamoca 和自平衡轮式移动机器人首次对外亮相 。
Jamoca 是国内首个能完成走梅花桩复杂挑战的四足机器人 , 而自平衡轮式移动机器人的相关研究成果还入选了机器人行业的顶级会议 IROS 2020 。
这两项进展均来自腾讯Robotics X 实验室 , 属于移动方向上的技术突破 , 也是机器人最基础的能力之一 。
腾讯 Robotics X 实验室于2018年成立 , 致力推进人机协作的下一代机器人研究 , 打造虚拟世界到真实世界的载体与连接器 。 目前实验室主攻移动、灵巧操作和智能体等三大通用机器人技术的研究与应用 , 并聚焦于多模态移动机器人的研发 。
四足移动机器人 Jamoca :能走、能跑、能跳 , 可挑战梅花桩复杂地形
“少林从师数十冬 , 梅花桩上练真功 。 持之以恒锐意修 , 定可成名盖群雄 。 ”
梅花桩是中国功夫的重要训练道具之一 , 习练梅花桩也是武侠小说中修炼轻功的基础 。 现在 , 梅花桩上迎来了一位新的“练功者”—— 腾讯四足移动机器人Jamoca 。
 文章插图
文章插图
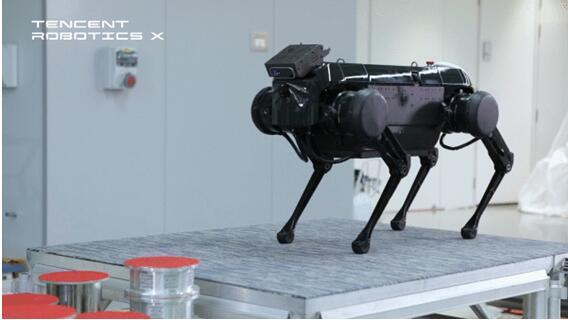
Jamoca 本体基于外部提供的硬件平台改装 , 重约70公斤 , 长1米、宽0.5米、站高0.75米
四足移动机器人 , 更常见的一个名字是机器狗 。 腾讯 Robotics X 实验室在外部提供的本体之上 , 基于自研的机器人控制技术 , 为Jamoca 打造了一个能应对复杂环境的智能大脑 。 这个大脑让 Jamoca 能行走、小跑和跳跃 , 并赋予了它自主定位和避障的能力 。
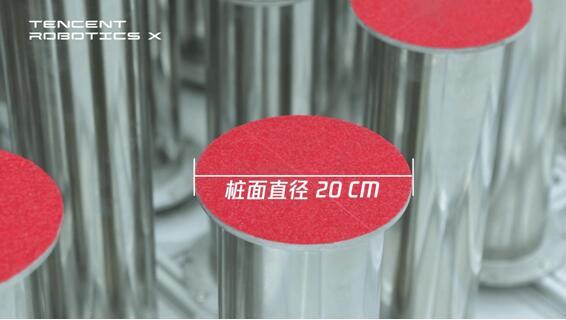
此次 Jamoca 完成的挑战由高60厘米、呈20°斜面角度的台阶和邻桩最大高度差16厘米、间距不等的梅花桩两部分组成 。
据腾讯 Robotics X 实验室研究员介绍 , 和国际上其他四足机器人走木块的场景比较 , 此次 Jamoca 所挑战的梅花桩落脚面积更小、高度更高 , 并有台阶的组合 , 实现的难度要更大 。
其中 , 考验机器人移动能力的难点主要有两个:理解梅花桩的排布(包括位置和高度)、选择最佳落脚点及路线并稳定精准地行走(落脚到梅花桩中心点) 。
 文章插图
文章插图
这正对应了实验室在移动技术方面钻研的的两个核心技术模块:感知、运动规划与控制;同时二者通过实验室的另一核心技术模块:整机系统设计与搭建 , 实现了系统性的集成融合 。
从 Jamoca 挑战的结果看 , 腾讯 Robotics X 实验室已经达到了极高的技术标准——误差1厘米内的感知定位、根据环境进行的10毫秒级路线规划、基于动力学的1KHz实时力矩控制、梅花桩中心点1厘米内的落脚误差 , 以及全系统的高度协同 。
 文章插图
文章插图
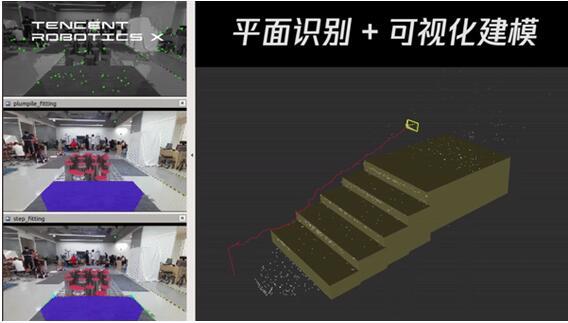
在精准环境感知方面 , Jamoca 创新性地实现了鲁棒的眼脚标定 , 并利用RGB-D相机对周围环境进行实时的感知 。 通过特征点匹配的方式 , 对 Jamoca 自身的运动轨迹进行在线跟踪 , 并将基于视觉的定位信息与基于运动学的里程计信息和 IMU(Inertial measurement unit , 惯性测量单元)数据进行融合 , 提高了定位追踪的精度和频率 。 同时利用算法识别和提取出台阶和梅花桩的表面区域范围和中心点位置 , 将定位和识别的数据进行融合 , 从而重建出整个三维运动场景 。
 文章插图
文章插图
在最优运动线路规划和实时的运动控制方面 , Jamoca 基于感知系统实时感知到的机器人本体及梅花桩位置信息 , 基于质心动力学 , 实现在线的质心轨迹生成和落脚点规划 。 在保证机器人的四条腿可以安全地踏到下一步的梅花桩的同时 , 优化出一条本体移动长度最短、综合耗力最小的运动轨迹 , 并且可以在线持续地进行上述运动规划 。
推荐阅读

















- 唐山四维智能科技有限公司:双臂机器人引领人机协作新纪元
- 大众展示EV公共充电新解决方案:移动充电机器人
- 普渡机器人获最佳商用服务机器人奖
- 翻译|机器翻译能达60个语种3000个方向,近日又夺全球五冠,这家牛企是谁?
- Google AI建立了一个能够分析烘焙食谱的机器学习模型
- 我国首次给四个新职业定标
- Clearbot:一款能自动在水上追踪收集垃圾的机器人
- 机器人|万州区举办“中国梦科技梦”机器人编程大赛
- “女性机器人”为啥火?外表颜值高、功能强,内部结构也一清二楚
- “机器人妻子”上市遭抢购,是在解决刚需,还是在挑战伦理?