“柠檬皮”软体机器人!26岁重庆小伙联合发明光磁场机器人,可爬坡、可卸货,有望用于体内药物递送|专访( 二 )
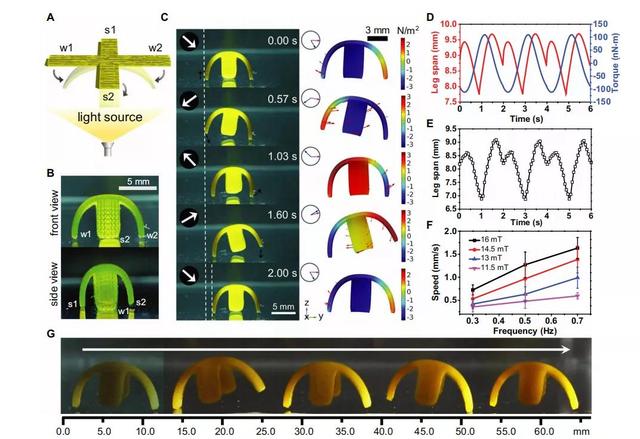
图 | 水凝胶机器人在旋转磁场下执行任务
当施加外磁场 , 水凝胶内部固定的磁性纳米线就会向水凝胶施加应力 , 从而让水凝胶产生形变 , 基于该原理就能控制机器人行走或者滚动 。 概括来说 , 这是基于磁场和弹性之间的一种耦合 。
这种化学合成 , 除让机器人实现行走和滚动之外 , 还能让它通过狭窄通道和复杂路线 。 当暴露在 LED 光下时 , 机器人的分子会排斥水分并让水分子逸出 , 其自身也会从平面十字形状、变成站立姿势 , 此时它的 “腿” 就像肌肉一样紧绷 。
由于机器人内嵌的镍骨架具有铁磁性 , 因此可通过磁场使机器人的腿部移动 。 为了驱动机器人 , 该团队把外加磁场编程为特定的序列 , 这些序列能让机器人沿着所需路径运动 , 再加上精确的计算 , 就可让机器人沿着预设的任意路径进行运动 。
 文章插图
文章插图
图 | 光触发在旋转磁场下行走
袁航说 , 此前机器人多数用 3D 打印 , 因此在材料合成时 , 磁场方向基本通过磁化就会固定下来 , 所以要改磁化方向就必须得加磁场 。 但是该团队加入了光场 , 因此可通过光场来调控磁化方向 , 磁化方向一变 , 机器人对磁场的响应也会随之改变 。
据悉 , 在该团队中的 Stupp 组于今年早些时候发表的一项研究中 , 机器人材料可以在几分钟内实现弯曲 , 并以每 12 小时一步的缓慢速度爬行 。 而现在的“柠檬片”可在磁场的响应下每秒迈出大约一步 , 可操控性更强 , 就像控制玩具车一样 。
一旦到达目的地 , 该机器人就可通过倒转形状来卸载货物 , 或者用跳街舞一样的旋转动作来脱落和释放较粘稠的物体 。
此外 , 该软体机器人还可通过分子设计 , 来识别并主动清除特定环境中不需要的颗粒 , 其运动速度也比此前诞生于同一实验室的软性机器人要快得多 。
 文章插图
文章插图
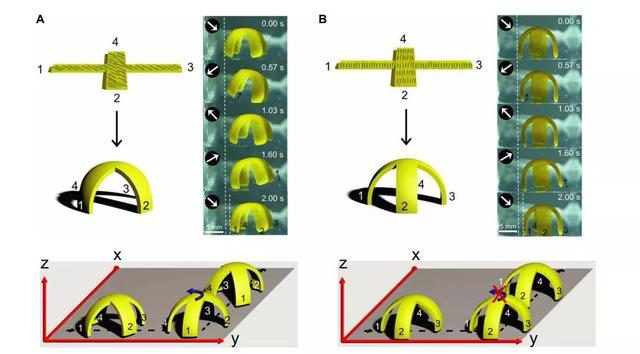
图 | 水凝胶机器人响应纳米线取向的行走模式
对于上述功能的实现 , 袁航告诉 DeepTech , 在机器人进行转向与轨迹设计实验时 , 他遵循磁弹性的理论 , 搭建了数值计算模型 , 并基于机器人感光后的形状与外加磁场强度 , 预测出了机器人相应的运动轨迹 。
机器人在运动时 , 需要一个很好的数学模型 , 所以袁航先在模型中计算 , 需要怎样的磁场来实现转向 。 然后 , 他和团队用在模型上计算出来的磁场 , 加载在实验室的设备上面 , 最终发现了和模型预言相当吻合的行为 。
可做药物递送和容器反应
 文章插图
文章插图
袁航认为 , 未来的机器人版本可能更小 , 甚至可以达到微米级别 , 届时就可在微观层面上操作 , 比如用于在病人体内的定向输送药物 , 将生物治疗剂或细胞精确地输送到特定组织 。
除递送药物之外 , 由于机器人中用的水凝胶具有亲水性 , 所以它和一些生物组织非常接近 , 也就是具备一定软度 , 因此可把它作为一种反应容器 。 比如要到达人体内一些不好到达的特殊位置 , 就可以让机器人过去 。
因为它和水有很好的兼容性 , 那就可以把一些化学分子扩散到机器人中来进行反应 。 而机器人在合成时 , 还可加入一些特定的靶向分子 , 这样就能在机器人上面进行反应 。
 文章插图
文章插图
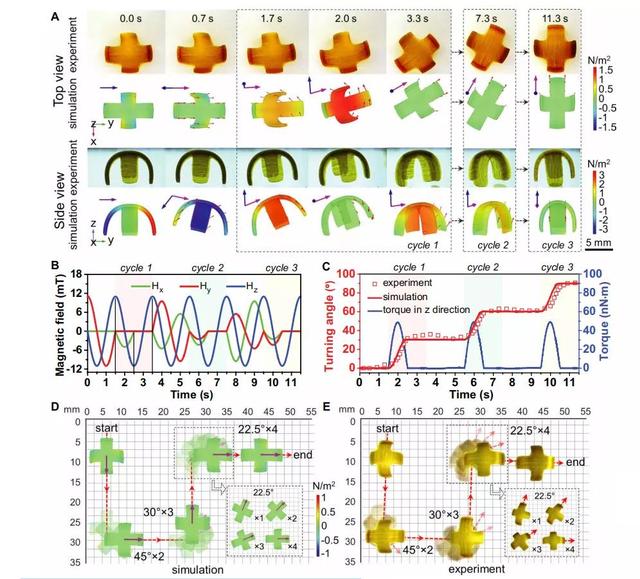
图 | 旋转磁场下的转向运动和路径
概括来说 , 该机器人是基于模仿生物的新材料设计 , 它不仅能实现更快的反应 , 还能实现更复杂的功能 。 除改变形状之外 , 还可给其添加腿部 , 并给予它更多的行走步态和更智能的行为 。 届时机器人就会具有高度的通用性 , 并能用于不同的任务 。
推荐阅读













- 唐山四维智能科技有限公司:双臂机器人引领人机协作新纪元
- 大众展示EV公共充电新解决方案:移动充电机器人
- 普渡机器人获最佳商用服务机器人奖
- Clearbot:一款能自动在水上追踪收集垃圾的机器人
- 机器人|万州区举办“中国梦科技梦”机器人编程大赛
- “女性机器人”为啥火?外表颜值高、功能强,内部结构也一清二楚
- “机器人妻子”上市遭抢购,是在解决刚需,还是在挑战伦理?
- 田伟院士:我眼中的医疗机器人
- 波士顿动力机器人组团出道,再次惊呆了全世界
- 送餐机器人等创新模式助力餐饮行业复苏发展