「智能汽车」两级标准分析与预测:最终形态可能为共享汽车
未来智能汽车会是怎样的形态?
- 自动驾驶
- 飞行汽车
 文章插图
文章插图某些品牌的飞行汽车使用的星型发动机 , 百公里耗油量可以达到≥50L的标准 , 等效折算为电耗则为150kwh/100km以上 。 使用燃油驱动尚可实现 , 而电驱则有电池组整备质量与推重比的矛盾;但是智能汽车转型电驱的初衷 , 正是为逐步减少到完全弃用常规能源 , 那么常规的飞行汽车则必然只是噱头 。
重点:唯一具备实现飞行汽车的前提怕是谁都无法接受 , 那就是利用磁悬浮技术实现无死角覆盖 , 车辆的悬空利用的是电磁场 。 这种模式的功耗理论上会小一些 , 就像是三体中描述的地下城;但是在地表有理想生存条件的前提下 , 谁愿意做穴居的“土拨鼠”呢?所以飞行汽车的话题到底为止 。
 文章插图
文章插图智能汽车-初级阶段现阶段已经有「准·智能汽车」 , 但是与一般理解的无人(自动)驾驶车辆仍有很大的差异 。 虽然量产车辆中已经L2/3/4等级的大量选项 , 甚至有些车企敢于将其车辆定义为L5级别的全自动驾驶;不过在实际应用中仍旧存在很多不确定因素 , 其中系统robust(鲁棒性能)是最大的问题 。
相信大部分能够读到这篇文章的读者 , 一定是智能手机或电脑的用户;那么在使用这些设备的过程中 , 有没有遇到过系统宕机或硬件故障(蓝屏死机)的情况呢?想来这也是无需置疑的答案 。 然而这些设备大多在理想的室内或室外环境中使用 , 设备的结构也是非常简单的;比如传感器至多有十几个 , 应用程序也很少 , 但就是这样的智能设备还有较高的故障率 , 智能汽车会如何呢?
 文章插图
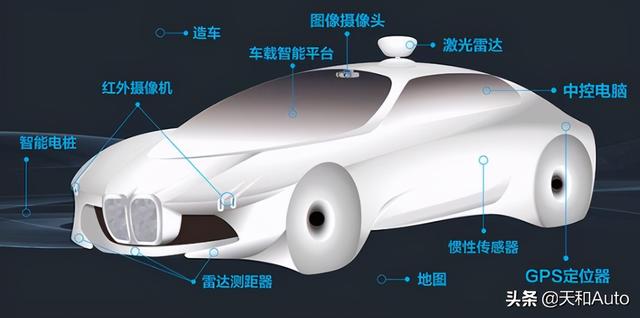
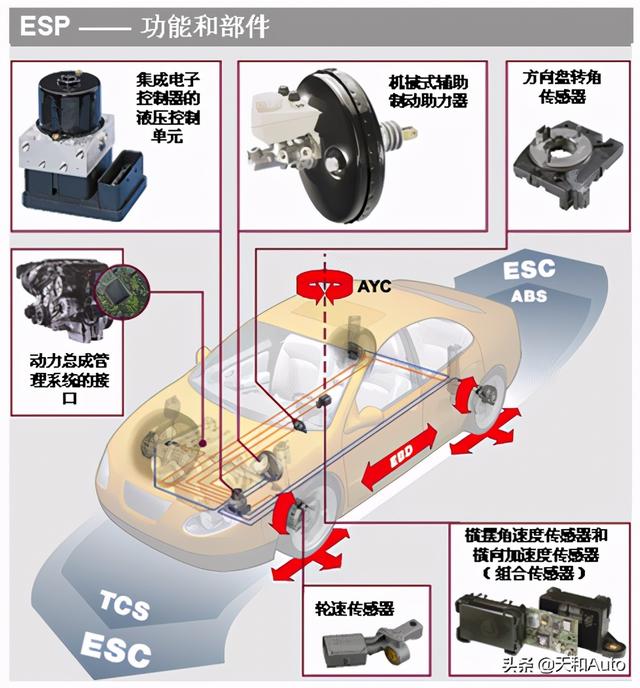
文章插图基础结构:
- ESP系统大量传感器
- 测距雷达
- 视频采集
 文章插图
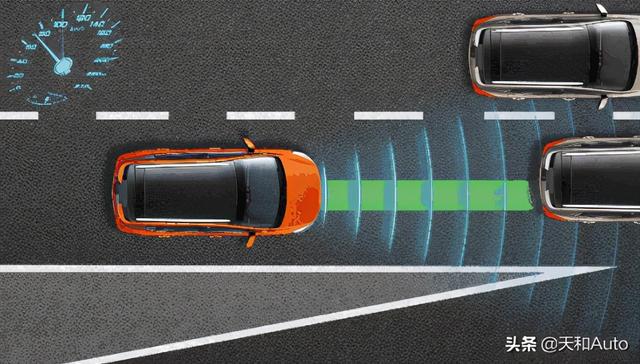
文章插图实测结果:很多新车上市都会去进行车辆的评测 , 这两年主要测试的项目多出≥L2级自动驾驶;可以说测试环节中是非常谨慎的 , 在使用自动驾驶系统的过程中 , 会做好随时接管车辆加减速的控制权限的准备 。
因为测试的一些知名品牌车辆都不够稳定 , AEB制动的效果会略好一些 , 但ASS自适应巡航系统能正常刹车那是运气;由于无法进行是否能准确操作的测试 , 只能大致说明这一系统正确制动的概率仍旧偏低 。 同时很多试装车不会联网 , 而且目前的环境也不用担心无人驾驶车辆被远程控制 , 然而如果出现特殊的情况 , 谁又能保证这些车不会变成“遥控车”呢?
 文章插图
文章插图第一阶段真正智能概念:自动驾驶系统辅助使用 , 车辆驾驶主体仍为自然人 。 智能体现在语音交互系统与车辆接入互联网 , 但并不装备或开放车辆的高度自动驾驶控制权限 。
推荐阅读

















- 小米11能检测心率:准确度堪比智能手表
- 马斯克刚成全球首富,行业又爆重磅新闻!百度要造汽车了,合作方是它!传与苹果合作造车,韩国汽车巨头股价暴涨
- 联想发布智能眼镜 ThinkReality A3
- Git服务器配置错误导致日产汽车源码在网上泄露
- 烟台港“管道智脑系统”上线 在国内率先实现原油储运全息智能排产
- 唐山四维智能科技有限公司:双臂机器人引领人机协作新纪元
- 电脑报2020年度获奖产品:引领智能商务无线投影时代的明基E系列商务投影机
- 关注 | 马斯克突然宣布:特斯拉或将迎来首届“人工智能日”
- 联想正开发下一代ThinkReality智能眼镜
- 199元 小米有品众筹智能健腹轮:LED数显 轻松练出马甲线