ж–Үз« жҸ’еӣҫ
еҰӮжһңеҜ№жҜ”дәҺSTM32еҚ•зүҮжңәе®һзҺ°зҡ„йҖ»иҫ‘еҸҜиғҪжӣҙжҳ“дәҺзҗҶи§Ј гҖӮ
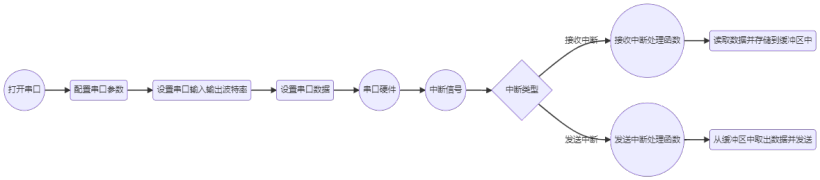
ж–Үз« жҸ’еӣҫ
дёӯж–ӯеӨ„зҗҶеҮҪж•°зҡ„еҗҚз§°дёҚеҗҢпјҡLinuxдҪҝз”Ёзҡ„жҳҜirqеҮҪж•°пјҢиҖҢSTM32дҪҝз”Ёзҡ„жҳҜHAL_UART_IRQHandlerеҮҪж•° гҖӮSTM32зҡ„дёӯж–ӯеӨ„зҗҶеҮҪж•°еҢ…еҗ«дәҶеҸ‘йҖҒдёӯж–ӯе’ҢжҺҘ收дёӯж–ӯпјҢйңҖиҰҒеңЁеӨ„зҗҶеҮҪж•°еҶ…йғЁиҝӣиЎҢеҢәеҲҶпјҢиҖҢLinuxдёӯзҡ„еҸ‘йҖҒе’ҢжҺҘ收еҲҶеҲ«жңүеҜ№еә”зҡ„дёӯж–ӯеӨ„зҗҶеҮҪж•° гҖӮеңЁLinuxдёӯпјҢеҸҜд»ҘйҖҡиҝҮttyи®ҫеӨҮж–Ү件зӣҙжҺҘи®ҝй—®дёІеҸЈпјҢиҖҢSTM32йңҖиҰҒдҪҝз”ЁдёІеҸЈAPIиҝӣиЎҢи®ҝй—®е’Ңж“ҚдҪң гҖӮSTM32йңҖиҰҒжүӢеҠЁејҖеҗҜе’Ңе…ій—ӯдёӯж–ӯпјҢиҖҢLinuxзҡ„дёӯж–ӯеӨ„зҗҶеҮҪж•°дјҡеңЁеҶ…ж ёдёӯиҮӘеҠЁеҗҜеҠЁе’ҢеҒңжӯў гҖӮLinuxдёӯпјҢж•°жҚ®зҡ„жҺҘ收е’ҢеҸ‘йҖҒжҳҜз”ұttyи®ҫеӨҮй©ұеҠЁе®ҢжҲҗзҡ„пјҢиҖҢSTM32йңҖиҰҒеңЁдёӯж–ӯеӨ„зҗҶеҮҪж•°еҶ…йғЁе®һзҺ°ж•°жҚ®зҡ„жҺҘ收е’ҢеҸ‘йҖҒ гҖӮдёӨиҖ…е…ій”®е·®ејӮжҳҜLINUXдҪҝз”ЁеҶ…ж ёз®ЎзҗҶдёӯж–ӯеҮҪж•°зҡ„еҗҜеҒң гҖӮ
д»ҘдёӢз»ҷеҮәдёҖз§ҚзӨәдҫӢзЁӢеәҸеҸҜд»Ҙж №жҚ®йңҖиҰҒиҝӣиЎҢдҝ®ж”№зј–иҜ‘еҗҲе…ҘеҶ…ж ёе®һзҺ°дёІеҸЈй©ұеҠЁ гҖӮ
#include <linux/module.h>#include <linux/init.h>#include <linux/serial_core.h>#include <linux/serial.h>#include <linux/tty.h>#include <linux/tty_flip.h>#define DRIVER_NAME "my_serial_driver"static struct uart_driver my_uart_driver = {.owner = THIS_MODULE,.driver_name = DRIVER_NAME,.dev_name = "ttyMY",// и®ҫеӨҮж–Ү件еҗҚпјҢдҫӢеҰӮ /dev/ttyMY0.major = 0,// иҮӘеҠЁеҲҶй…Қдё»и®ҫеӨҮеҸ·.minor = 0,// иҮӘеҠЁеҲҶй…Қд»Һи®ҫеӨҮеҸ·.nr = 1,// ж”ҜжҢҒзҡ„жңҖеӨ§дёІеҸЈж•°йҮҸ};// дёІеҸЈ probe еҮҪж•°пјҢз”ЁдәҺеҲқе§ӢеҢ–дёІеҸЈеҸӮж•°е’ҢжіЁеҶҢдёІеҸЈи®ҫеӨҮstatic int my_serial_probe(struct uart_port *port){// и®ҫзҪ®дёІеҸЈеҸӮж•°port->ops = &my_uart_driver.ops;port->type = PORT_16550A;port->iotype = UPIO_MEM;port->ioport = 0x3f8;// дёІеҸЈзҡ„ I/O з«ҜеҸЈең°еқҖport->irq = 4;// дёІеҸЈзҡ„дёӯж–ӯеҸ·port->flags = UPF_BOOT_AUTOCONF;return uart_add_one_port(&my_uart_driver, port);// жіЁеҶҢдёІеҸЈи®ҫеӨҮ}// дёІеҸЈ remove еҮҪж•°пјҢз”ЁдәҺжіЁй”ҖдёІеҸЈи®ҫеӨҮstatic void my_serial_remove(struct uart_port *port){uart_remove_one_port(&my_uart_driver, port);// жіЁй”ҖдёІеҸЈи®ҫеӨҮ}// дёІеҸЈж“ҚдҪңеҮҪж•°иЎЁпјҢиҝҷйҮҢеҸӘйңҖиҰҒе®һзҺ° probe е’Ң remove еҮҪж•°static struct uart_ops my_uart_ops = {.tx_empty = NULL,.set_mctrl = NULL,.get_mctrl = NULL,.stop_tx = NULL,.start_tx = NULL,.send_xchar = NULL,.stop_rx = NULL,.enable_ms = NULL,.break_ctl = NULL,.startup = NULL,.shutdown = NULL,.flush_buffer = NULL,.set_termIOS = NULL,.type = NULL,.release_port = NULL,.request_port = NULL,.config_port = NULL,.verify_port = NULL,.ioctl = NULL,.send_xchar_locked = NULL,};// жЁЎеқ—еҲқе§ӢеҢ–еҮҪж•°пјҢеңЁиҝҷйҮҢжіЁеҶҢдёІеҸЈй©ұеҠЁstatic int my_serial_init(void){int ret = 0;// жіЁеҶҢдёІеҸЈй©ұеҠЁret = uart_register_driver(&my_uart_driver);if (ret) {printk(KERN_ERR "Failed to register UART drivern");return ret;}// и®ҫзҪ®дёІеҸЈж“ҚдҪңеҮҪж•°иЎЁдёӯзҡ„ probe е’Ң remove еҮҪж•°my_uart_ops.probe = my_serial_probe;my_uart_ops.remove = my_serial_remove;my_uart_driver.ops = my_uart_ops;return ret;}// жЁЎеқ—еҚёиҪҪеҮҪж•°пјҢеңЁиҝҷйҮҢжіЁй”ҖдёІеҸЈй©ұеҠЁstatic void my_serial_exit(void){uart_unregister_driver(&my_uart_driver);}module_init(my_serial_init);module_exit(my_serial_exit);MODULE_LICENSE("GPL");й©ұеҠЁеҸҜд»ҘйҖҡиҝҮmakefileзј–иҜ‘дёә.koж–Ү件еҗҺйҖҡиҝҮinsmodеҗҲе…ҘеҶ…ж ё гҖӮ常规й©ұеҠЁзҡ„и°ғз”Ёж–№ејҸдёІеҸЈй©ұеҠЁзЁӢеәҸеңЁж–°зҡ„жқҝеҚЎдёҠйҖҡеёёз”ұеҺӮ家иҝӣиЎҢи®ҫеӨҮж ‘йҖӮй…Қе’Ңй©ұеҠЁејҖеҸ‘пјҢеңЁе®һйҷ…дҪҝз”ЁжЎҲдҫӢеҪ“дёӯйңҖиҰҒзҶҹз»ғжҺҢжҸЎйҖҡиҝҮж–Ү件жҸҸиҝ°з¬ҰеҗҲttyеұӮи°ғз”ЁдёІеҸЈй©ұеҠЁеҚіеҸҜ гҖӮд»ҘдёӢеұ•зӨәдёІеҸЈй©ұеҠЁзҡ„и°ғз”Ёж–№ејҸ
#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <unistd.h>#include <termios.h>#define DEVICE "/dev/ttyMY0"int main(){int fd = 0;struct termios tio;char buf[256];// жү“ејҖи®ҫеӨҮж–Ү件fd = open(DEVICE, O_RDWR | O_NOCTTY | O_NDELAY);if (fd < 0) {perror("open");return -1;}// и®ҫзҪ®дёІеҸЈеҸӮж•°tcgetattr(fd, &tio);tio.c_iflag = IGNBRK | IGNPAR;tio.c_oflag = 0;tio.c_cflag = CS8 | CREAD | CLOCAL;tio.c_lflag = 0;tio.c_cc[VTIME] = 0;tio.c_cc[VMIN] = 1;cfsetispeed(&tio, B9600);cfsetospeed(&tio, B9600);tcsetattr(fd, TCSANOW, &tio);// иҜ»еҸ–дёІеҸЈж•°жҚ®printf("Reading from serial port...n");while (1) {int n = read(fd, buf, sizeof(buf));if (n > 0) {buf[n] = '';printf("Received: %s", buf);}}// е…ій—ӯи®ҫеӨҮж–Ү件close(fd);return 0;еҜ№дәҺеҲҡеҲҡејҖеҸ‘зҡ„й©ұеҠЁзЁӢеәҸеҸҜд»ҘйҖҡиҝҮд»ҘдёҠзЁӢеәҸиҝӣиЎҢз®ҖеҚ•жөӢиҜ•е’ҢйӘҢиҜҒ гҖӮе®һжҲҳжЎҲдҫӢжҺҘдёӢжқҘеұ•зӨәдёҖз§ҚйҖҡиҝҮUnionPi TigerејҖеҸ‘жқҝиҝӣиЎҢдёІеҸЈж•°жҚ®ж”¶еҸ‘зҡ„ж–№жЎҲпјҢеҹәжң¬жҖқи·ҜжҳҜйҖҡиҝҮдёӨдёӘзәҝзЁӢеҲҶеҲ«жҺ§еҲ¶дёІеҸЈзҡ„收еҸ‘д»»еҠЎпјҢе°Ҷ收еҲ°зҡ„ж•°жҚ®иҝӣиЎҢеӨ„зҗҶеҗҺеҶҚеҸ‘йҖҒз»“жһң гҖӮ
#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <string.h>#include <sys/types.h>#include <fcntl.h>#include <unistd.h>#include <pthread.h>//е®Ҹе®ҡд№ү#define OK 0#define ERR (-1)//йқҷжҖҒеҸҳйҮҸstatic int fd1;// дёІеҸЈи®ҫеӨҮж–Ү件жҸҸиҝ°з¬Ұstatic int fd2;static int send_data;// дј иҫ“зҡ„ж•°жҚ®// д»ҺдёІеҸЈиҜ»зҡ„зәҝзЁӢ// иҪ¬жҚўжіўзү№зҺҮspeed_t conver_baudrate(int baudrate){switch (baudrate) {case 9600L:return B9600;case 19200L:return B19200;case 38400L:return B38400;case 115200L:return B115200;case 1152000L:return B1152000;default:return 1152000L;}}void set_baud(int fd, int baud){int ret = ERR;struct termios opt;tcgetattr(fd, &opt); // tcgetattrз”ЁжқҘиҺ·еҸ–з»Ҳз«ҜеҸӮж•°пјҢе°Ҷд»Һз»Ҳз«ҜиҺ·еҫ—зҡ„дҝЎжҒҜfdпјҢдҝқеӯҳеҲ°optз»“жһ„дҪ“дёӯtcflush(fd, TCIOFLUSH); // еҲ·жё…зј“еҶІеҢәcfsetispeed(&opt, baud);cfsetospeed(&opt, baud);ret = tcsetattr(fd, TCSANOW, &opt); // и®ҫзҪ®з»Ҳз«ҜеҸӮж•°еҲ°optдёӯпјҢдҪҝд№Ӣз«ӢеҚіз”ҹж•Ҳif (ret == ERR) {perror("tcsetattr fd");exit(0);}tcflush(fd, TCIOFLUSH); // еҲ·жё…зј“еҶІеҢә}// и®ҫзҪ®ж•°жҚ®дҪҚint setup_data_bits(int setup_databits, struct termios *options_databits){if (options_databits == NULL) {perror("setup_data_bits error");return ERR;}switch (setup_databits) {case 5L:options_databits->c_cflag |= CS5;break;case 6L:options_databits->c_cflag |= CS6;break;case 7L:options_databits->c_cflag |= CS7;break;case 8L:options_databits->c_cflag |= CS8;break;default:return ERR;}return OK;}// и®ҫзҪ®ж ЎйӘҢдҪҚint set_params_parity(int setup_parity, struct termios *options_parity){switch (setup_parity) {case 'n':case 'N':// ж— еҘҮеҒ¶ж ЎйӘҢдҪҚoptions_parity->c_cflag &= ~PARENB; // Clear parity enable/options_parity->c_iflag &= ~INPCK;// disable input parity checking/break;case 'o':case 'O':// и®ҫзҪ®дёәеҘҮж ЎйӘҢoptions_parity->c_cflag |= (PARODD | PARENB); // odd parity checkingoptions_parity->c_iflag |= INPCK;// enable parity checkingbreak;case 'e':case 'E':// и®ҫзҪ®дёәеҒ¶ж ЎйӘҢoptions_parity->c_cflag |= PARENB;// Enable parity /options_parity->c_cflag &= ~PARODD; // even parity/options_parity->c_iflag |= INPCK;// enable parity checking /break;case 'M':case 'm': // ж Үи®°еҘҮеҒ¶ж ЎйӘҢoptions_parity->c_cflag |= PARENB | CMSPAR | PARODD;options_parity->c_iflag |= INPCK; // enable parity checking /break;case 'S':case 's': // и®ҫзҪ®дёәз©әж јoptions_parity->c_cflag |= PARENB | CMSPAR;options_parity->c_cflag &= ~PARODD;options_parity->c_iflag |= INPCK; // enable parity checking /break;default:return ERR;}return OK;}// и®ҫзҪ®ж ЎйӘҢдҪҚint set_params(int fd, int databits, int stopbits, int parity){struct termios options;int ret = ERR;if (tcgetattr(fd, &options) != 0) {perror("tcgetattr failn");return ERR;}options.c_iflag = 0;options.c_oflag = 0;// setup data bitsoptions.c_cflag &= ~CSIZE;ret = setup_data_bits(databits, &options);if (ret == ERR) {return ERR;}// parityret = set_params_parity(parity, &options);if (ret == ERR) {return ERR;}// stop bits/switch (stopbits) {case 1:options.c_cflag &= ~CSTOPB;break;case 2L:options.c_cflag |= CSTOPB;break;default:return ERR;}// иҜ·жұӮеҸ‘йҖҒе’Ңжё…йҷӨеҸ‘йҖҒoptions.c_cflag &= ~CRTSCTS;options.c_lflag = 0;options.c_cc[VTIME] = 10L;options.c_cc[VMIN] = 1;tcflush(fd, TCIFLUSH);if (tcsetattr(fd, TCSANOW, &options) != 0) {return ERR;}return OK;}// и®ҫзҪ®жіўзү№зҺҮint uart_init(int fd, int uartBaud){set_baud(fd, conver_baudrate(uartBaud));// uart param /if (set_params(fd, 8L, 1, 'n')) {perror("set uart parameters failn");return ERR;}return OK;}int data_proce(recv){if(recv=="hello_world"){send_data=https://www.isolves.com/it/cxkf/ydd/hms/2023-03-09/1;return 1;}else{send_data =0;return 0;}}void *_serial_output_task(void){pthread_detach(pthread_self());int ret;ret=write(fd2,(unsigned char *) send_data,1);if(ret>0)printf("send success");else {printf("send error");}usleep(10000);}void *_serial_input_task(void){int i = 0;int ret = ERR;// еҮҪж•°иҝ”еӣһеҖјint buf = 0;// з”ЁдәҺдҝқеӯҳиҜ»еҸ–еҲ°зҡ„еӯ—иҠӮint recv[FRAME_LEN] = {0};// з”ЁдәҺдҝқеӯҳжҺҘ收еҲ°зҡ„ж•°жҚ®while (1) {// иҜ»еҸ–дёҖеё§ж•°жҚ®for (i = 0; i
жҺЁиҚҗйҳ…иҜ»
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- е®үеҫҪеҢ»з§‘еӨ§еӯҰз ”з©¶з”ҹжӢӣз”ҹз®Җз« 2021 е®үеҫҪеҢ»з§‘еӨ§еӯҰ
- еҫ·еӣҪеӨ§еӯҰз ”з©¶з”ҹз”іиҜ·иҰҒжұӮ еҫ·еӣҪеӨ§еӯҰжҺ’еҗҚ
- з ”з©¶з”ҹеҺӢеҠӣеӨ§еҲ°еҙ©жәғ з ”з©¶з”ҹи·іжҘј
- иҒҠдёҖиҒҠOpenHarmonyеҗҜеҠЁйЎөеҗҺи®°
- йҳІж°ҙжҸ’еӨҙеӣҫзүҮ йҳІж°ҙе…¬жҜҚжҸ’еӨҙ
- дёҠжө·з”өзјҶз ”з©¶жүҖдё»еҠһдёӯеӣҪз”өзәҝз”өзјҶзҪ‘гҖӮдёҠжө·з”өзјҶз ”з©¶жүҖеҫ…йҒҮеҰӮдҪ•
- еұұиҘҝеӨ§еҗҢеӨ§еӯҰз ”з©¶з”ҹжӢӣз”ҹз®Җз« дёҠжө·еӨ§еҗҢеӨ§еӯҰ
- еҢ—йӮ®|зЎ•еЈ«з ”з©¶з”ҹе·Із»ҸдёҚеҖјй’ұдәҶпјҹеҢ—йӮ®2023зҡ„жӢӣиҒҳпјҢи®©дәәж„ҹеҲ°еҫҲж— еҘҲ
- дёӯиҲ№зі»з»ҹе·ҘзЁӢз ”з©¶йҷўдәәеӨ§йҷ„дёӯ иҲ№иҲ¶зі»з»ҹе·ҘзЁӢйғЁ
- е®үеҫҪеҶңдёҡеӨ§еӯҰз ”з©¶з”ҹеҘҪиҖғеҗ— е®үеҫҪеҶңдёҡеӨ§еӯҰ