зү©иҒ”зҪ‘|SRAMдёҺDRAMзңҹжӯЈеҢәеҲ«пјҢдҪ зңҹзҡ„жҳҺзҷҪеҗ—( дәҢ )
еҲҡжүҚжҖ»з»“еҲ°дәҶSRAMжңүзқҖеҫҲзү№еҲ«зҡ„дјҳзӮ№ пјҢ дҪ иҜҘеҘҪеҘҮиҝҷ家дјҷжҳҜжҖҺж ·зҡ„иҝҗдҪңиҝҮзЁӢпјҹ
дёҖдёӘSRAMеҚ•е…ғйҖҡеёёз”ұ4-6еҸӘжҷ¶дҪ“з®Ўз»„жҲҗ пјҢ еҪ“иҝҷдёӘSRAMеҚ•е…ғиў«иөӢдәҲ0жҲ–иҖ…1зҡ„зҠ¶жҖҒд№ӢеҗҺ пјҢ е®ғдјҡдҝқжҢҒиҝҷдёӘзҠ¶жҖҒзӣҙеҲ°дёӢж¬Ўиў«иөӢдәҲж–°зҡ„зҠ¶жҖҒжҲ–иҖ…ж–ӯз”өд№ӢеҗҺжүҚдјҡжӣҙж”№жҲ–иҖ…ж¶ҲеӨұ гҖӮ SRAMзҡ„йҖҹеәҰзӣёеҜ№жҜ”иҫғеҝ« пјҢ дё”жҜ”иҫғзңҒз”ө пјҢ дҪҶжҳҜеӯҳеӮЁ1bitзҡ„дҝЎжҒҜйңҖиҰҒ4-6еҸӘжҷ¶дҪ“з®ЎеҲ¶йҖ жҲҗжң¬еҸҜжғіиҖҢзҹҘ пјҢ дҪҶDRAMеҸӘиҰҒ1еҸӘжҷ¶дҪ“з®Ўе°ұеҸҜд»Ҙе®һзҺ° гҖӮ
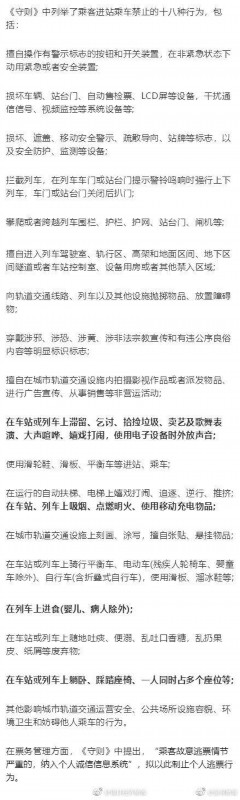
иҝһжҺҘдёҖдёӢSRAMзҡ„з»“жһ„ пјҢ жҜ”иҫғеҮәеҗҚзҡ„жҳҜ6еңәж•Ҳеә”з®Ўз»„жҲҗдёҖдёӘеӯҳеӮЁbitеҚ•е…ғзҡ„з»“жһ„пјҡ
жң¬ж–ҮжҸ’еӣҫ
гҖҗзү©иҒ”зҪ‘|SRAMдёҺDRAMзңҹжӯЈеҢәеҲ«пјҢдҪ зңҹзҡ„жҳҺзҷҪеҗ—гҖ‘M1-6иЎЁзӨә6дёӘжҷ¶дҪ“з®Ў пјҢ SRAMдёӯзҡ„жҜҸдёҖдёӘbitеӯҳеӮЁз”ұ4дёӘеңәж•Ҳеә”з®ЎM1234жһ„жҲҗдёӨдёӘдәӨеҸүиҖҰеҗҲзҡ„еҸҚзӣёеҷЁдёӯ гҖӮ дёҖдёӘSRAMеҹәжң¬еҚ•е…ғжңү0гҖҒ1 дёӨдёӘзҠ¶жҖҒ гҖӮ
SRAMеҹәжң¬еҚ•е…ғз”ұдёӨдёӘCMOSеҸҚзӣёеҷЁз»„жҲҗ пјҢ дёӨдёӘеҸҚзӣёеҷЁзҡ„иҫ“е…Ҙиҫ“еҮәдәӨеҸүиҝһжҺҘ пјҢ еҚіз¬¬дёҖдёӘеҸҚзӣёеҷЁзҡ„иҫ“еҮәиҝһжҺҘ第дәҢдёӘеҸҚзӣёеҷЁзҡ„иҫ“е…Ҙ пјҢ 第дәҢдёӘеҸҚзӣёеҷЁзҡ„иҫ“еҮәиҝһжҺҘ第дёҖдёӘеҸҚзӣёеҷЁзҡ„иҫ“е…Ҙ гҖӮ иҝҷе®һзҺ°дәҶдёӨдёӘеҸҚзӣёеҷЁиҫ“еҮәзҠ¶жҖҒзҡ„й”Ғе®ҡгҖҒдҝқеӯҳ пјҢ еҚіеӯҳеӮЁдәҶдёҖдёӘдҪҚе…ғзҡ„зҠ¶жҖҒ гҖӮ
дёҖиҲ¬иҖҢиЁҖ пјҢ жҜҸдёӘеҹәжң¬еҚ•е…ғзҡ„жҷ¶дҪ“з®Ўж•°йҮҸи¶Ҡе°‘ пјҢ е…¶еҚ з”Ёйқўз§Ҝе°ұдјҡи¶Ҡе°Ҹ гҖӮ з”ұдәҺзЎ…жҷ¶еңҶз”ҹдә§жҲҗжң¬зӣёеҜ№еӣәе®ҡ пјҢ жүҖд»ҘSRAMеҹәжң¬еҚ•е…ғйқўз§Ҝи¶Ҡе°Ҹ пјҢ еңЁиҠҜзүҮдёҠе°ұеҸҜеҲ¶йҖ жӣҙеӨҡзҡ„дҪҚе…ғеӯҳеӮЁ пјҢ жҜҸдёӘдҪҚе…ғеӯҳеӮЁзҡ„жҲҗжң¬е°ұи¶ҠдҪҺ гҖӮ
SRAMе·ҘдҪңеҺҹзҗҶзӣёеҜ№жҜ”иҫғз®ҖеҚ• пјҢ жҲ‘们е…ҲзңӢеҶҷ0е’ҢеҶҷ1ж“ҚдҪң гҖӮ
еҶҷ0ж“ҚдҪң
еҶҷ0зҡ„ж—¶еҖҷ пјҢ йҰ–е…Ҳе°ҶBLиҫ“е…Ҙ0з”өе№і пјҢ пјҲпҪһBLпјүиҫ“е…Ҙ1з”өе№і гҖӮ
然еҗҺ пјҢ зӣёеә”зҡ„Word LineпјҲWLпјүйҖүйҖҡ пјҢ еҲҷM5е’ҢM6е°Ҷдјҡиў«жү“ејҖ гҖӮ
0з”өе№іиҫ“е…ҘеҲ°M1е’ҢM2зҡ„GжһҒжҺ§еҲ¶з«Ҝ
1з”өе№іиҫ“е…ҘеҲ°M3е’ҢM4зҡ„GжһҒжҺ§еҲ¶з«Ҝ
еӣ дёәM2жҳҜPеһӢз®Ў пјҢ й«ҳз”өе№іжҲӘжӯў пјҢ дҪҺз”өе№іеҜјйҖҡ гҖӮ иҖҢM1еҲҷзӣёеҸҚ пјҢ й«ҳз”өе№іеҜјйҖҡ пјҢ дҪҺз”өе№іжҲӘжӯў гҖӮ
жүҖд»ҘеңЁ0з”өе№ізҡ„дҪңз”ЁдёӢ пјҢ M1е°ҶжҲӘжӯў пјҢ M2е°Ҷжү“ејҖ гҖӮ пјҲпҪһQ)зӮ№е°ҶдјҡзЁіе®ҡеңЁй«ҳз”өе№і гҖӮ
еҗҢж · пјҢ M3е’ҢM4зҡ„жҺ§еҲ¶з«Ҝе°Ҷдјҡиҫ“е…Ҙй«ҳз”өе№і пјҢ еӣ NPз®ЎдёҚеҗҢ пјҢ M3е°ҶдјҡеҜјйҖҡ пјҢ иҖҢM4е°ҶдјҡжҲӘжӯў гҖӮ QзӮ№е°ҶдјҡзЁіе®ҡеңЁдҪҺз”өе№і0 гҖӮ
жңҖеҗҺ пјҢ е…ій—ӯM5е’ҢM6 пјҢ еҶ…йғЁM1,M2,M3е’ҢM4еӨ„еңЁзЁіе®ҡзҠ¶жҖҒ пјҢ дёҖдёӘbitдёә0зҡ„ж•°жҚ®е°ұиў«й”ҒеӯҳдҪҸдәҶ гҖӮ
жӯӨж—¶ пјҢ еңЁеӨ–йғЁVDDдёҚж–ӯз”өзҡ„жғ…еҶөдёӢ пјҢ иҝҷдёӘеҶ…е®№е°ҶдјҡдёҖзӣҙдҝқжҢҒ гҖӮ
дёӢйқўйҖҡиҝҮеҠЁз”»жқҘи§ӮеҜҹдёҖдёӢеҶҷ0зҡ„иҝҮзЁӢ гҖӮ
еҶҷ1ж“ҚдҪң
иҝҷйҮҢдёҚеҶҚйҮҚеӨҚ пјҢ еӨ§е®¶еҸҜд»ҘиҮӘе·ұжҺЁжј”дёҖдёӢиҝҮзЁӢ гҖӮ иҝҷйҮҢд»Қ然жҸҗдҫӣеҶҷ1иҝҮзЁӢеҠЁз”» гҖӮ
иҜ»ж“ҚдҪң
иҜ»ж“ҚдҪңзӣёеҜ№жҜ”иҫғз®ҖеҚ• пјҢ еҸӘйңҖиҰҒйў„е……BLе’ҢпјҲ~BLпјүеҲ°жҹҗдёҖй«ҳз”өе№і пјҢ 然еҗҺжү“ејҖM5е’ҢM6 пјҢ еҶҚйҖҡиҝҮе·®еҲҶж”ҫеӨ§еҷЁе°ұиғҪеӨҹиҜ»еҮәе…¶дёӯй”Ғеӯҳзҡ„еҶ…е®№ гҖӮ
SRAMиЎҢдёҡеҸ‘еұ•и¶ӢеҠҝ
йҡҸзқҖеӨ„зҗҶеҷЁж—Ҙи¶ӢејәеӨ§ пјҢ е°әеҜёи¶ҠеҸ‘зІҫе·§ гҖӮ 然иҖҢжӣҙеҠ ејәеӨ§зҡ„еӨ„зҗҶеҷЁйңҖиҰҒзј“еӯҳиҝӣиЎҢзӣёеә”зҡ„ж”№иҝӣ гҖӮ дёҺжӯӨеҗҢж—¶жҜҸдёҖдёӘж–°зҡ„е·ҘиүәиҠӮзӮ№и®©еўһеҠ еөҢе…ҘејҸзј“еӯҳеҸҳеҫ—иү°е·Ёиө·жқҘ гҖӮ SRAMзҡ„6жҷ¶дҪ“з®Ўжһ¶жһ„(йҖ»иҫ‘еҢәйҖҡеёёеҢ…еҗ«4дёӘжҷ¶дҪ“з®Ў/еҚ•е…ғ)ж„Ҹе‘ізқҖжҜҸе№іж–№еҺҳзұідёҠзҡ„жҷ¶дҪ“з®Ўзҡ„ж•°йҮҸе°ҶдјҡйқһеёёеӨҡ гҖӮ иҝҷз§ҚжһҒй«ҳзҡ„жҷ¶дҪ“з®ЎеҜҶеәҰдјҡйҖ жҲҗеҫҲеӨҡй—®йўҳ пјҢ е…¶дёӯеҢ…жӢ¬пјҡ
жң¬ж–ҮжҸ’еӣҫ
SERпјҡиҪҜй”ҷиҜҜзҺҮ;Processnodeпјҡе·ҘиүәиҠӮзӮ№softпјҡиҪҜй”ҷиҜҜ
жӣҙжҳ“еҮәзҺ°иҪҜй”ҷиҜҜпјҡе·ҘиүәиҠӮзӮ№д»Һ130nmзј©е°ҸеҲ°22nmеҗҺ пјҢ иҪҜй”ҷиҜҜзҺҮйў„и®Ўе°ҶеўһеҠ 7еҖҚ гҖӮ
жӣҙдҪҺзҡ„жҲҗе“ҒзҺҮпјҡз”ұдәҺдҪҚеҚ•е…ғйҡҸзқҖжҷ¶дҪ“з®ЎеҜҶеәҰзҡ„еўһеҠ иҖҢзј©е°Ҹ пјҢ SRAMеҢәеҹҹжӣҙе®№жҳ“еӣ е·ҘиүәеҸҳеҢ–еҮәзҺ°зјәйҷ· гҖӮ иҝҷдәӣзјәйҷ·е°ҶйҷҚдҪҺеӨ„зҗҶеҷЁиҠҜзүҮзҡ„жҖ»жҲҗе“ҒзҺҮ гҖӮ
жӣҙй«ҳзҡ„еҠҹиҖ—пјҡеҰӮжһңSRAMзҡ„дҪҚеҚ•е…ғеҝ…йңҖдёҺйҖ»иҫ‘дҪҚеҚ•е…ғзҡ„еӨ§е°ҸзӣёеҗҢ пјҢ йӮЈд№ҲSRAMзҡ„жҷ¶дҪ“з®Ўе°ұеҝ…йЎ»е°ҸдәҺйҖ»иҫ‘жҷ¶дҪ“з®Ў гҖӮ иҫғе°Ҹзҡ„жҷ¶дҪ“з®ЎдјҡеҜјиҮҙжі„йңІз”өжөҒеҚҮй«ҳ пјҢ д»ҺиҖҢеўһеҠ еҫ…жңәеҠҹиҖ— гҖӮ
еҸҰдёҖдёӘжҠҖжңҜеҸ‘еұ•и¶ӢеҠҝеҸҜз©ҝжҲҙз”өеӯҗдә§е“Ғзҡ„еҮәзҺ° гҖӮ еҜ№дәҺжҷәиғҪжүӢиЎЁгҖҒеҒҘиә«жүӢзҺҜзӯүеҸҜз©ҝжҲҙи®ҫеӨҮиҖҢиЁҖ пјҢ е°әеҜёе’ҢеҠҹиҖ—жҳҜе…ій”®еӣ зҙ гҖӮ з”ұдәҺз”өи·Ҝжқҝзҡ„з©әй—ҙжңүйҷҗ пјҢ MCUеҝ…йЎ»еҒҡеҫ—еҫҲе°Ҹ пјҢ иҖҢдё”еҝ…йЎ»иғҪеӨҹдҪҝз”ЁдҫҝжҗәејҸз”өжұ жҸҗдҫӣзҡ„еҫ®е°Ҹз”өйҮҸиҝҗиЎҢ гҖӮ


жҺЁиҚҗйҳ…иҜ»













- Spacex|еҚ«жҳҹдә’иҒ”зҪ‘иҪЁйҒ“иө„жәҗзЁҖзјәпјҢдёӯеӣҪиҲӘеӨ©еҰӮдҪ•дёҺеӣҪйҷ…еҚ«жҳҹз•ҢеӨ§дәЁз«һдәүпјҹ
- дёүйҳІ|еёҰдҪ дәҶи§ЈдёүйҳІжүӢжҢҒз»Ҳз«Ҝзҡ„з§ҳеҜҶ
- дә’иҒ”зҪ‘|е»әиЎҢвҖңж•°еӯ—дәәж°‘еёҒй’ұеҢ…вҖқе·ІдёҠзәҝ д»…йҷҗйғЁеҲҶжөӢиҜ•ең°еҢәејҖйҖҡ
- иЎҢдёҡдә’иҒ”зҪ‘|еӨ§еҚҺиӮЎд»ҪдёҺеӨ§иҝһйҮҸеӨ©з§‘жҠҖзӯҫзҪІжҲҳз•ҘеҗҲдҪңеҚҸи®®
- иЎҢдёҡдә’иҒ”зҪ‘|еҺҹеҲӣ дј°еҖј2000дәҝпјҒеҲҳејәдёңжүӢдёӯиҝҷеј вҖңзӢ¬и§’е…ҪвҖқпјҢжҲҗз«Ӣж—¶й—ҙз«ҹ然дёҚеҲ°дёӨе№ҙпјҹ
- иЎҢдёҡдә’иҒ”зҪ‘|жқҺзӮіеҝ 15зӮ№жӯЈејҸе®ҳе®ЈпјҢrealmeжҲҗз«Ӣ2е№ҙпјҢзЁіеұ…е…Ёзҗғ第дёғпјҒ
- дә’иҒ”зҪ‘|еҗҢеҹҺи·‘и…ҝй…ҚйҖҒз”ҹж„ҸеҘҪеҒҡеҗ—пјҹйңҖиҰҒжіЁж„Ҹд»Җд№Ҳпјҹ
- дә’иҒ”зҪ‘|жӢӣз”ҹйғЁй—Ёе…¬еҸ·д№ҹжңүй«ҳд»ҝпјҹпјҒеҫ®дҝЎеӣһеә”пјҡе·Іжё…йҷӨдёүеҚғеӨҡдёӘ
- дә’иҒ”зҪ‘|马дә‘жңҖйҮҚиҰҒдёҖж¬Ўиң•еҸҳпјҢй«ҳиҖғеӨұеҲ©еҗҺ蹬дёүиҪ®йҒҮи§Ғд»–пјҢж”№еҸҳдәҶе…¶дёҖз”ҹиҪЁиҝ№
- иЎҢдёҡдә’иҒ”зҪ‘|дёӯе…ҙйҖҡи®ҜеҸ‘еёғ2020е№ҙеҚҠе№ҙеәҰжҠҘе‘Ҡ иҗҘдёҡ收е…Ҙиҫҫ472дәҝе…ғ